font rendering
character
character就是電腦符號。譯作「字元」或「字符」。
電腦符號都有編號。世界公定的編號方式是Unicode 。例如第30399號是「算」,第9775號是「☯」。電腦符號包括了世界各國文字、數字、圖示、表情符號等等。
電腦符號必須編碼,節省儲存空間。Unicode有著UTF-8和UTF-16兩種主流的編碼方式。
字元編碼,是編碼理論 的範疇。字元操作,是字串處理 的範疇。字元顯示,是計算機繪圖 的範疇,是我們現在要談的內容。
font
font就是文字的造型。譯作「字體」或「字型」。
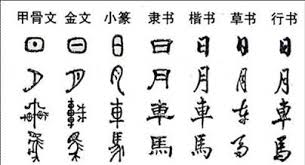
從書寫的觀點:中文字體有楷書、行書、草書、隸書、篆書五大類,有名的楷書如顏真卿、柳公權。字體是書法家發明的。
從電腦的觀點:繁體中文字型有標楷體、細明體、微軟正黑體。英文字型有Times New Roman、Helvetica、Palatino。字型是美術設計師和程式設計師發明的。
只要有文字的地方,通常都能更換字型,例如文字編輯器、瀏覽器、作業系統、命令提示字元。電腦可供使用的字型,主要是看你的電腦安裝了哪些字型。有專門製作字型、販售字型的公司,例如專精繁體中文字型的JustFont 、文鼎 、華康 。亦有人號召製作免費開源字型,例如更紗黑體 、文泉驛 。
電腦顯示字元,必須透過字型。每一套字型都只替一部分的字元設計造型,例如Times New Roman只設計了英文字母、拉丁字母、少量的特殊符號,例如微軟正黑體只設計了英文字母、中文字、少量的特殊符號。一套字型當中,沒有設計造型的字元,就無法顯示,或者是顯示問號、空白方格等等莫名其妙的符號。儘管現今沒有任何一套字型涵蓋Unicode規定的所有字元 ,不過其實也不需要一套萬能的字型 。對於沒有設計造型的字元,作業系統將另尋其他字型。
字型由作業系統控管。想要讓視窗程式顯示特定字型,土法煉鋼的方式是Windows API ,輕鬆寫意的方式是程式語言內建的函式庫。想要讓網頁顯示特定字型,利用CSS的font-family即可。
glyph
接著到了本篇文章的主角「字形」。首先玩個小遊戲吧 !拖曳控制點,按enter評分。美感和眼力必須很傑出。設計師的日常。
「字形」就是單獨一個字元的形狀。由演算法自動調整形狀,或由文字設計師手動調整形狀。
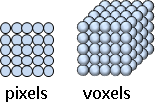
glyph的資料結構
三種:點陣字dot-matrix、筆劃字stroke、輪廓字outline。
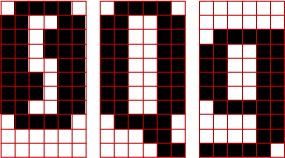
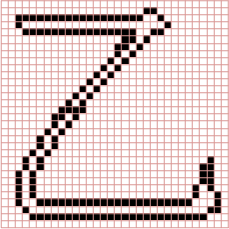
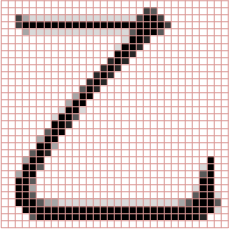
點陣字 :用黑色方格(像素)拼成字形。
電腦已經淘汰點陣字型了,例如Fixedsys 。然而有些字型為了支援極小尺寸,仍會搭配點陣字型,例如文泉驛點陣宋 。
點陣字使用最多的地方不是電腦,而是大眾運輸的LCD跑馬燈。
筆劃字:直覺的方式。特別適合漢字。
記錄起點座標、終點座標、寫法(永字八法 :側勒努趯策掠啄磔)(英文字母筆劃剖析 )、曲率參數、變換矩陣。最後以演算法加粗筆劃,生成字型。優點是容易創造新字型,缺點是美感不佳。累死工程師、悶死設計師。
可惜的是,我們無法獲得筆劃資料。中文筆劃資料,屬於商業機密,更有專利保護 。大家不得其門而入。例如王漢宗字型 侵權案,個人猜測是從神秘管道得到筆劃資料 ,再自創加粗筆劃的演算法。
可惜的是,我們無法得知筆劃加粗的演算法。即便是開源字型,也從未公開演算法。必須跟字型公司簽技術合作。
這多少阻礙了組字 、造字 、文字資料庫 、筆劃檢索 、手寫辨識 的進展。
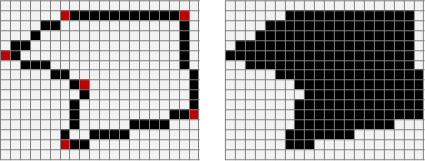
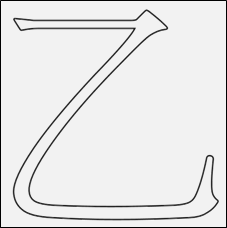
輪廓字:公定的方式。現今字型皆是輪廓字。
輪廓由許多線條組成,線條一律是「直線線段 :兩個端點」和「Bézier curve :兩個端點與兩個控制點」。最後以演算法填充輪廓內部,生成字型。
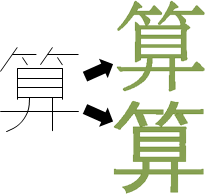
幸運的是,我們可以獲得輪廓資料。安裝免費開源的字形編輯軟體FontForge ,下載免費開源的字型思源黑體 、文泉驛正黑 ,將字形匯出成.eps或.svg檔案即得。上面的「算」就是這樣來的。
注意到,字型都有著作權,未經授權不可使用字型檔案裡面的數據,即使免費。讀者做實驗時,一定要記得選擇免費且開源的字型,以免觸法。
輪廓字的檔案格式主要有兩種:囊括所有格式的OpenType(.otf)、早期的TrueType(.ttc .ttf)。OpenType是當今主流,網路上有不少資訊。如果你有志鑽研字型渲染,可以自己寫程式存取OpenType檔案,也可以參考開源的字型渲染引擎FreeType 。
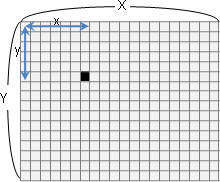
em square:字形的編輯區域
活字印刷當中,em是指鉛字寬度。電腦字型當中,em square是指字形的編輯區域。就這樣。
outlining:描繪輪廓
運用上個章節的繪製直線與繪製曲線演算法即可。
描繪輪廓目前沒有公定標準。即便是相同字型相同字形,在Firefox、Chrome、Windows、OS X的顯示結果通常略有不同。不同的字型渲染引擎,呈現不同結果。你也可以自己寫一個。
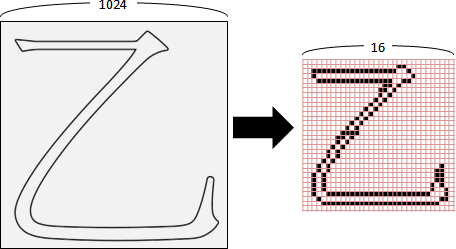
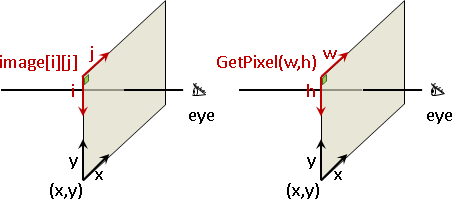
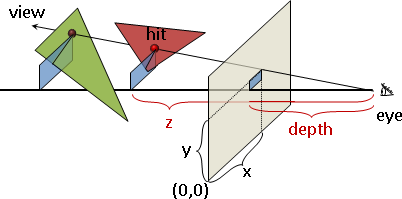
為了讓輪廓座標變成像素座標,這裡介紹一下pt和dpi。
電腦字型大小,單位是pt (PostScript point),是長度單位。72pt = 1英吋,pt除以72得到英吋。電腦字型通常預設12pt。
長度變成像素數量,單位是dpi (dot per inch),每英吋多少點(像素)。電腦螢幕通常是96dpi,實體印刷至少是300dpi。
比方說,12pt字型,96dpi解析度,一個字形的邊長含有12 ÷ 72 × 96 = 16個像素。
假設em square的邊長是1024。輪廓座標(x,y),等比例縮放得到像素座標(round(x÷1024×16), round(y÷1024×16))。
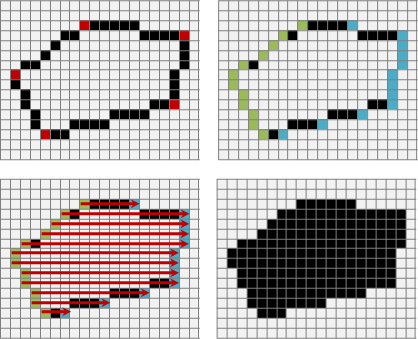
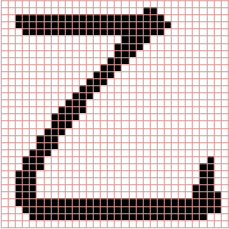
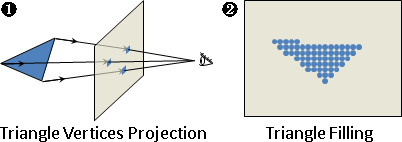
filling:填充輪廓
運用上個章節的scanline fill algorithm 。輪廓不能交叉重疊,以利判斷內外。
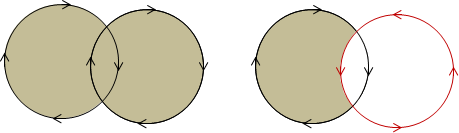
如果讓輪廓具有方向性,順時針為正,逆時針為負,則得以設計聯集與差集。
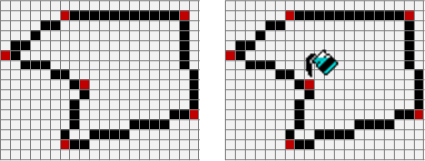
overlap removing:重疊的輪廓,簡化成一個輪廓
為了順利填充輪廓,凡是輪廓交叉重疊,就必須重新整合。
有兩種狀況:一個輪廓自身交叉、兩個輪廓互相重疊。
需要處理的事情:求交點、求聯集或差集、重新安排頂點順序。需要的演算法:線段交點 、Bézier curve交點 、多邊形交集 。不太容易實作,讀者可以挑戰看看。
字形編輯軟體有此功能,節省設計師的作業時間。
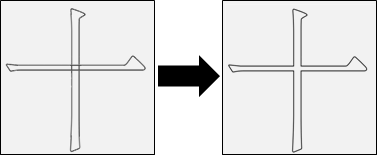
hinting / grid fitting:微調字形位置
像素座標只能是整數。座標四捨五入變成整數,可能往左往下跑、可能往右往上跑,筆劃粗細有所改變。尤其是字形縮放大小,例如從12pt到14pt,問題更加嚴重。
像素大小固定。當字形縮小至非常小,例如6pt,所有筆劃通通黏結在一起。此時整個字形都得重新設計,甚至改成點陣字。
目前已經有演算法,可以自動微調字形位置。不過凡事總有例外,仍需設計師人工檢視、手動微調。各種常見縮放尺寸,都得一一檢視。中文數萬字,一字一字做,一日一日做,愚公移山、精衛填海!
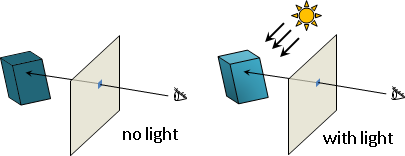
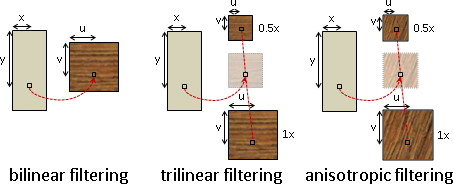
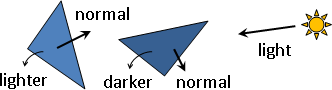
anti-aliasing:微調字形邊緣的像素數值
在字形邊緣設定漸層顏色,使得字形邊緣柔順、清晰。
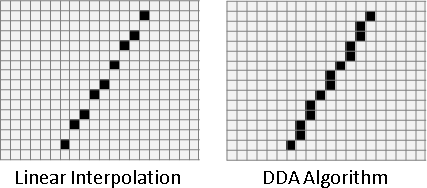
像素整齊排列。對於一條斜線,黑白顯示器,無可避免地,一定有鋸齒;灰階顯示器、彩色顯示器,則可以微調鄰近像素數值,達到平滑效果。
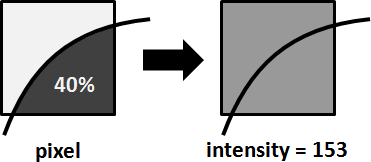
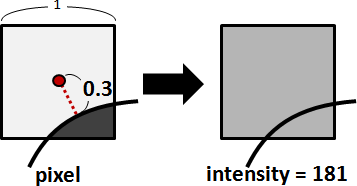
三種演算法:面積、距離、分割像素。
面積 :像素視作正方形。如果字形佔據40%的面積,就將數值設定為40%,也就是255 - (255 × 40%) = 153。
距離 :像素到輪廓的最短距離。貝茲曲線轉換成多項式,再解方程式(求根)求得最短距離。也可以用分治法 。
分割像素 :彩色顯示器,一個像素由RGB三個元件組成,調整RGB亮度比重,強調邊緣。缺點是邊緣五顏六色,相當刺眼,不是每個人都喜歡。知名演算法是微軟ClearType。
VIDEO
VIDEO
ICPC 3702
metrics:設定字形間距
字形的部分已經介紹完畢了,接下來是排版的部分。
FreeType的說明文件已經有精美圖片。這裡就不重畫了。
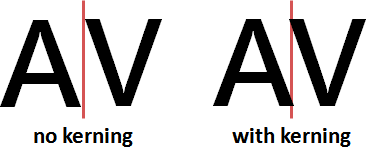
kerning:微調字形間距
比方來說,AV合在一起時,視覺感受是留白太多,需要更緊密一點。AB、AD不需要更緊密,保持原本排版即可。
解法是事先設定特殊組合。OpenType支援此設定。屬於文字處理 的範疇。
另外還有一種情況,出現於阿拉伯文、泰文等等。這些語言根據語義,銜接或斷開字形。
解法是剖析語義。OpenType沒有此設定,由排版引擎自行實作。屬於自然語言處理 的範疇。
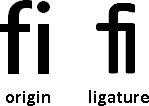
ligature:連合字形
比方來說,fi合在一起時,書寫感受是筆劃太多,需要更簡潔一點,於是連合成新字形。解法同前。
專門用於程式設計的字體,也有連合功能。例如Iosevka 、Fira Code 、Cascadia Code 、JetBrains Mono ,將!=改成≠,將->改成→。
未涉及的主題
因為我沒有跟字型公司簽技術合作,所以知道的事情有限。
一、輪廓字的編輯介面。
二、輪廓字、筆劃字、點陣字之間的轉換。華康有個專利 ,演算法是迴歸 。
三、拆字組字。簡化字型製作流程。
四、調字。根據環境、根據版面,自動調整字形 。
五、手寫字形。工程師 (詳細演算法 )和設計師 (詳細流程 )有著不同的策略。
六、壓縮。減少字型檔案大小。例如compact table format和MicroType Express。
七、列印文字。印表機韌體設計。
font design
VIDEO
VIDEO
這是設計師的專業。已有人寫書拍片,我就不班門弄斧了。
演算法生成的字形太過呆板 (例如墨字的四個點如何點 )。目前的作業流程是:先由工程師產生大致輪廓,再由設計師調整細節。
繁體中文的筆劃寫法,台灣政府有訂立標準。不過政府標準不見得是好看的 ,也不代表是正統的 。
typeface design / typography design
VIDEO
VIDEO
也許可以看看spiro curve 、文字雲 、筆劃裝飾 。
math rendering
畫數學式子與畫字形,原理相同,只是還要再解決一個問題:數學式子的資料結構為何?目前最流行的方式,是用純文字記錄一道算式,所採用的文法是TeX的語法。
讀者可以參考MathJax。
web rendering




















{kind=link}