polygon
polygon
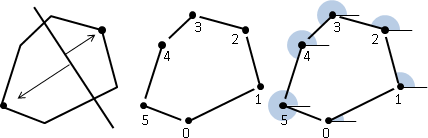
「多邊形」。許多條邊,端點對著端點,串接成一圈的圖形。
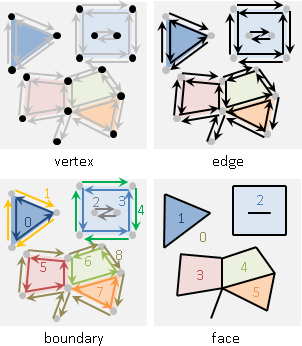
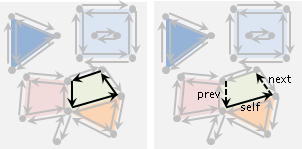
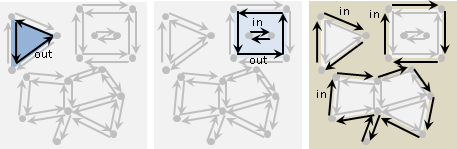
資料結構
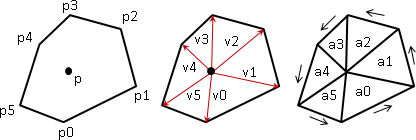
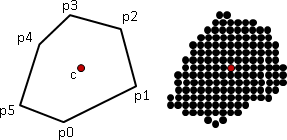
想要記錄一個多邊形的資訊,有許多種方法,例如:一、按照連接順序把多邊形的邊放到一個陣列裡面;二、按照連接順序把多邊形的頂點放到一個陣列裡面;三、挑一個頂點作為起點,從起點開始按照連接順序把各條邊的長度、邊與邊之間的夾角放到一個陣列裡面。
這幾種方法的空間複雜度都是O(N),N為多邊形的頂點數目,也可以說是邊的數目。
多邊形分類:數學的觀點
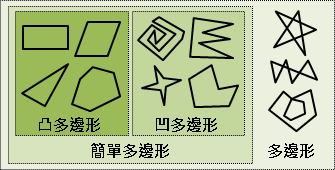
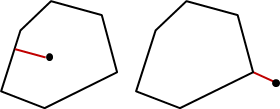
多邊形(polygon):許多條邊,端點對著端點,串接成一圈的圖形。 簡單多邊形(simple polygon):所有的邊都不相交,只有相鄰的邊可以相交於一個頂點。 凹多邊形(convave polygon):多邊形內部必有兩點連線,穿過多邊形外部。 凸多邊形(convex polygon):多邊形內部所有兩點連線,都在多邊形內部。
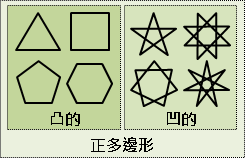
正多邊形(regular polygon):每條邊都一樣長、每個角都一樣大的多邊形。 凸的正多邊形:就是我們熟悉的正三角形、正方形、正五邊形、……。 凹的正多邊形:就是正五角星、正七角星、正八角星、……。 詳細資料請自行搜尋關鍵字regular star polygon。
UVa 12300
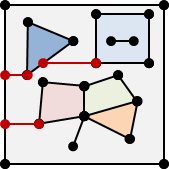
多邊形分類:計算學的觀點
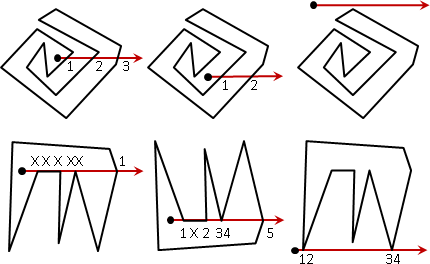
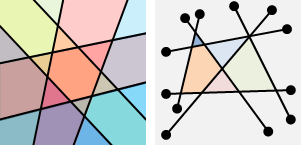
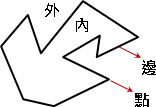
簡單多邊形(simple polygon)。所有的邊都不相交,只有相鄰的邊可以相交於一個頂點。
簡單多邊形圍出一個明確的封閉區域。一般的多邊形無法分辨內外,而簡單多邊形可以明確分辨內外。
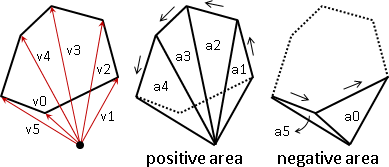
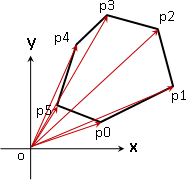
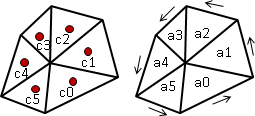
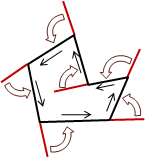
沿邊走一回,剛好自旋360°;所有外角相加是360°。我們習慣讓頂點順序是逆時針方向,以符合叉積的方向。
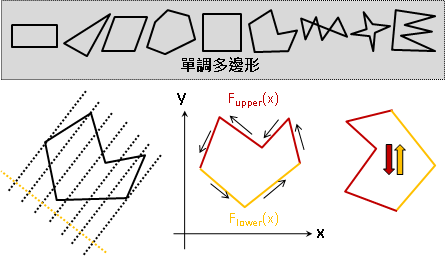
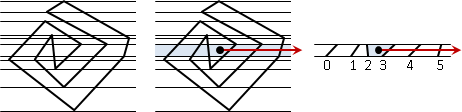
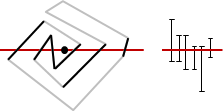
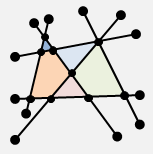
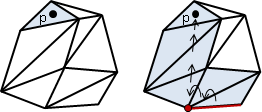
單調多邊形(monotone polygon)。至少存在一條直線,這條直線的每一條垂直線,與單調多邊形的交點在兩點以下。
換句話說,單調多邊形旋轉至某個角度之後,可以切割成上下兩條鏈,兩條鏈都符合函數定義。單調多邊形可以寫成兩個函數。
換句話說,單調多邊形有兩條鏈,在某個方向上先單調遞增、再單調遞減,彷彿單峰函數。
簡單一句話:單調多邊形是兩條已排序的鏈。
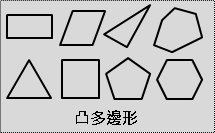
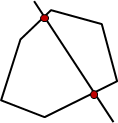
凸多邊形(convex polygon)。總是朝同一個方向轉彎。
凸多邊形同時是簡單多邊形和單調多邊形,無論哪種方向都是單調多邊形。數學性質非常強!

正交多邊形(orthogonal polygon、rectilinear polygon、axis-parallel polygon、axis-aligned polygon)。每條邊都平行於座標軸,轉彎總是轉90°或270°。

有洞多邊形(polygon with hole)。多邊形的內部有數個洞,洞的內部有數個多邊形。有洞多邊形,其實不屬於多邊形,其實是數個多邊形。我們可以用順時針代表多邊形、逆時針代表洞。多邊形的聯集、交集、差集,結果常常是有洞多邊形。