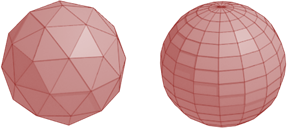
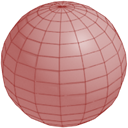
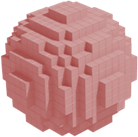
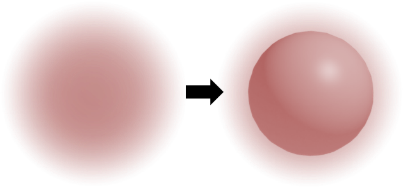
A Smoothness Energy without Boundary Distortion for Curved Surfaces (2020)
https://odedstein.com/projects/curved-hessian/
1. min distance min x*Lx
2. min area min x*L_cotx = min curvature
3. min curvature variance min x*L_cot^2x
"implicit fairing of irregular meshes using diffusion and curvature flow"(1999)
4. min willmore energy min (k1 - k2)^2 conformal! (2005)
5. min xxx energy min (k1^2 + k2^2)
Leif Kobbelt "Discrete Fairing" (1997)
6. min bilaplacian energy: 1/2 integral |laplace u|^2 dx ==x=> ||grad u||^2
7. min hessian energy: 1/2 integral Hu:Hv dx ===> tr(Hu^t Hv)
https://odedstein.com/projects/curved-hessian/
1. find hole
2. triangulation (dynamic programming)
2-1. min area triangulation
2-2. min-max dihedral angle triangulation
2-3. min weight triangulation
3. refine
4. fair
《Filling Holes in Meshes》
mesh cutting
切割。剪開網格,形成邊界。
1. conformal parameterization
2. distortion measure for pairwise shortest path
3. minimum spanning tree
《Surface-based Cut Construction for Planar Graph》
mesh zippering
拉鍊。兩個網格表面,邊緣相互黏貼,併成一個網格表面。
《Zippered Polygon Meshes from Range Images》
mesh controlling🚧
mesh skeleton extraction
剝皮剔骨。
laplacian smoothing:收縮邊直到變成骨架。
《Skeleton Extraction by Mesh Contraction》2008
《Mean Curvature Skeletons》2012
《Point Cloud Skeletons via Laplacian Based Contraction》
《3D Skeleton: A State-of-the-Art Report》
mesh cage generation
穿衣戴帽。
《Interactive Cage Generation for Mesh Deformation》2017
《Skeleton Based Cage Generation Guided by Harmonic Fields》2019
mesh deformation
形變。維持模型的基礎結構,改變模型的形狀。
n-point deformation:網格頂點當作控制點,直接形變。
skeleton deformation:額外建立樹狀骨架,端點是控制點。又稱pose space deformation。
cage deformation:額外建立網格框架,頂點是控制點。
[skeleton deformation]
yi = sum wij mj xi
i,j
x: mesh vertex
m: bone vertex
w: weight such that sum wij = 1 for each i
j
y: skin vertex
[delta mush]
1. laplacian smoothing: x' = (I - aL)^k x
2. rigid alignment: min sum (I - aL)^k || Fj xi - yi ||^2
F i
spatial method:
(fixed boundary/dirichlet) minimize sum of all pairs energy: laplacian matrix
(free boundary/neumann) pin 2 points, matrix size * 2
spectral method:
minimize sum of all-pairs energy + constraint sum of weight: Laplacian eigenmap
all pairs geodesic shortest path: Isomap/MDS