架構
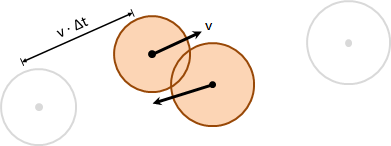
rigid body motion
├ rigid body
├ rigid body motion
├ rigid body contact force
└ rigid body collision
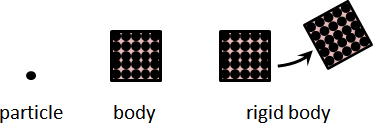
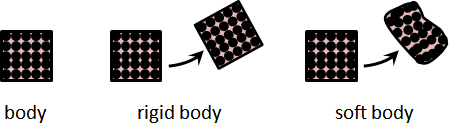
rigid body
質點。一份物質,只考慮慣量,不考慮體積。
物體。質點連成一串、連成一片、連成一團,形成特定形狀。
剛體。質點距離固定不變,無論如何運動。
地球不存在質點、物體、剛體。它們只是特殊的數學模型,用於描述特殊的物理現象。
物理學家發明質點、物體、剛體,意在長話短說、講重點。要是從原子、化學鍵、晶體結構開始講起,太過複雜、講不清楚。
rigid body motion
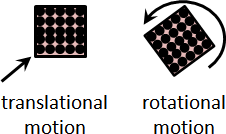
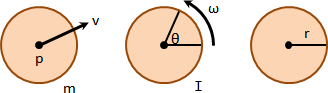
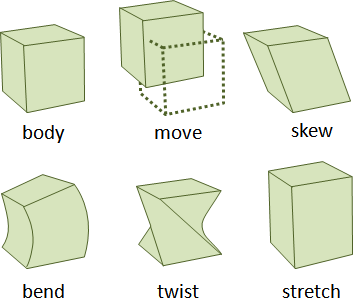
質點運動只能移動。剛體運動只能移動和轉動。
地球不存在質點運動、剛體運動。它們只是模仿了數學的剛體變換。
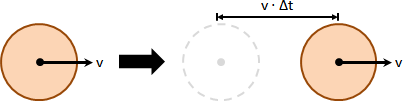
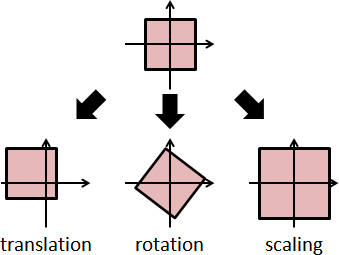
translational motion
rotational motion
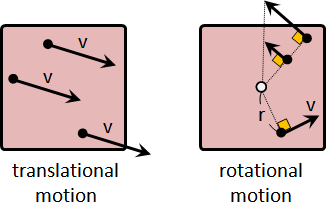
平移運動(移動):速度大小、速度方向,每個質點全部一致。
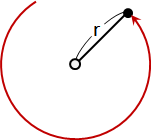
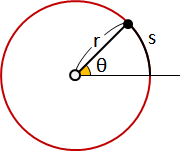
旋轉運動(轉動):速度大小正比於半徑大小。速度方向垂直於半徑方向。
剛體轉動,其質點不會轉動。否則物體就散架了。
剛體轉動,其質點只會移動。軌跡是圓形。
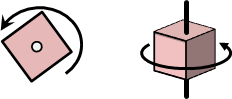
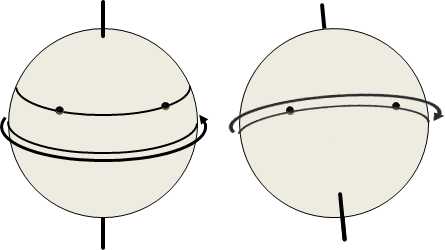
instantaneous center of rotation
instantaneous axis of rotation
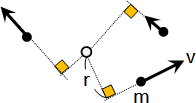
剛體轉動過程當中,速度是零的位置。可能在物體外部。
旋轉中心(瞬心):二維轉動的情況下,形成一個點。
轉軸(瞬軸):三維轉動的情況下,形成一條線。
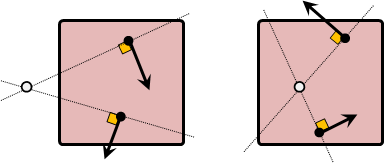
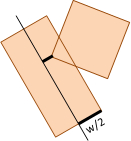
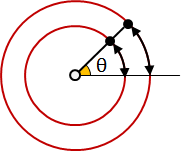
二維轉動,給定兩點速度,可以推導旋轉中心。速度垂線交點。
三維轉動,給定兩點速度,可以推導轉軸。速度垂面交線。
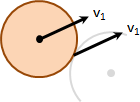
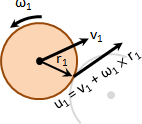
combined translational and rotational motion
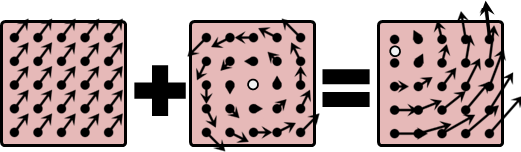
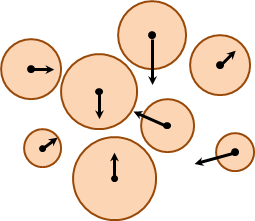
剛體的每個質點各自擁有速度。
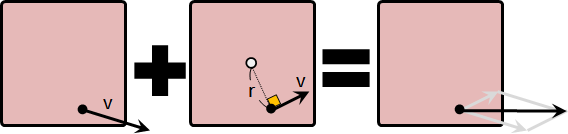
又移動又轉動,質點速度是兩者速度相加。
二維的情況下,又移動又轉動,等同於不移動只轉動。旋轉中心改變了。
三維的情況下,又移動又轉動,等同於又沿轉軸移動、又繞轉軸轉動。轉軸改變了。
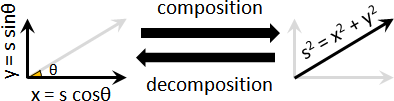
translational momentum of rotational motion
剛體的每個質點各自擁有速度。
平移運動:質點速度一致。平移動量總和顯而易見。
旋轉運動:當物體均勻對稱,而且旋轉中心是對稱中心,平移動量總和才是零。否則平移動量總和通常不是零。甚至每個時刻的平移動量總和,方向都不同。
又移動又轉動,平移動量守恆,那麼運動軌跡為何?我不知道。
平移速度可以納入旋轉速度。那麼平移動量可以納入旋轉動量嗎?平移慣量可以納入旋轉慣量嗎?我不知道。
translational inerita(mass)
剛體可以定義平移慣量(質量)。以下是推導過程。
剛體平移速度=質點平移速度。依據是質點距離固定不變、質點速度均等。
v = vᵢ for all i
v = v₁ = v₂ = ...
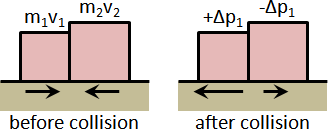
剛體平移動量=質點平移動量總和。稱作動量守恆定律law of momentum conservation。
p = ∑ mᵢvᵢ
p = m₁v₁ + m₂v₂ + ...
剛體平移慣量=質點平移慣量總和。依據是數學分配律。
m = ∑ mᵢ
p = m₁v₁ + m₂v₂ + ...
= m₁v + m₂v + ...
= (m₁ + m₂ + ...)v
let p = mv
thus m = m₁ + m₂ + ... when v ≠ 0
剛體可以視作大量質點。剛體平移慣量=質點平移慣量總和。剛體平移動量=質點平移動量總和。剛體平移動量變化=質點平移動量變化總和。旋轉亦然。
rotational inertia(moment of inertia)
剛體可以定義旋轉慣量(慣性矩)。推導過程如法炮製。
剛體旋轉速度=質點圓周運動平移速度。依據是spin motion轉換公式。
ω = ωᵢ for all i
剛體旋轉動量=質點圓周運動平移動量總和。依據是動量守恆定律law of momentum conservation。
L = ∑ Iᵢωᵢ
剛體旋轉慣量=質點旋轉慣量總和。依據是數學分配律。
I = ∑ Iᵢ
剛體旋轉半徑=質點旋轉半徑方均根。稱作迴轉半徑radius of gyration。簡稱gyradius。
rgy = √∑ rᵢ² / n
I = ∑ Iᵢ
m rgy² = ∑ mᵢrᵢ²
m rgy² = ∑ (m/n)rᵢ²
rgy² = ∑ (1/n)rᵢ²
rgy = √∑ rᵢ² / n
注意到,雖然命名為旋轉,但是其實是自旋。成為歷史共業。
translational inertia(mass)
rotational inertia(moment of inertia)
平移運動、旋轉運動,各自擁有慣量。
平移慣量(質量):一個數值,實際測量而得。m。
旋轉慣量(慣量矩):一個數值(純量版本)或者一個矩陣(向量版本),利用微積分推導而得。I。
首先確認旋轉中心,以便得到旋轉半徑。平移慣量乘以旋轉半徑平方,累計每個質點。令質點無限微小,對質點積分。
translational momentum(linear momentum)
rotational momentum(angular momentum)
平移運動、旋轉運動,各自擁有動量。
平移動量(線動量):平移慣量乘以平移速度。p=mv。
旋轉動量(角動量):旋轉慣量乘以旋轉速度。L=Iω。
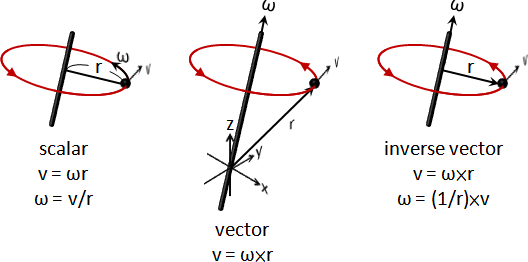
上述數學公式,可以引入半徑r,藉由spin motion。
兩者皆是純量,可以推廣成向量,藉由叉積。
旋轉動量(線動量):p=mv推廣成p=L×(1/r)。
平移動量(角動量):L=Iω推廣成L=r×p。
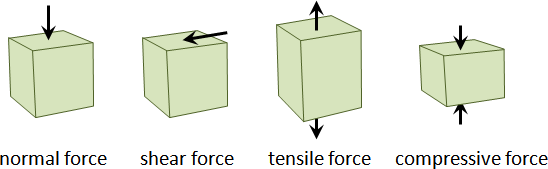
translational force(force)
rotational force(torque)
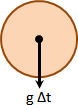
平移力(力):平移動量變化快慢。F=dp/dt。
旋轉力(力矩):旋轉動量變化快慢。T=dL/dt。
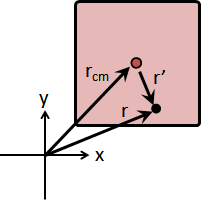
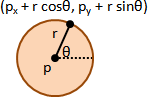
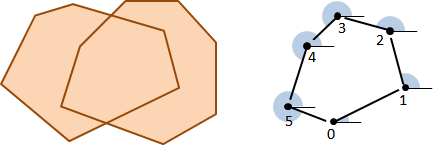
center of mass
剛體可以定義質心。
質心位置。質點位置的加權平均數,權重是平移慣量(質量)。
rcm = (∑ mᵢrᵢ) / (∑ mᵢ)
質心速度。質心位置變化快慢。
vcm = d/dt rcm
質心的主要用途是建立數學公式。推導過程源自這本書籍。
剛體質點位置。拆成兩項,質心位置與相對位置。
r = rcm + r̃
剛體質點速度。拆成兩項,質心速度與相對速度。
v = vcm + ṽ
vᵢ = d/dt rᵢ
= d/dt (rcm + r̃ᵢ)
= (d/dt rcm) + (d/dt r̃ᵢ)
= vcm + ṽᵢ
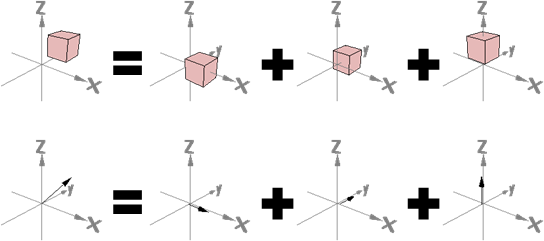
大量質點旋轉慣量(當旋轉中心位於原點)。拆成兩項,軌道慣量與自旋慣量(公轉與自轉)。
I = Icm + ∑ mᵢr̃ᵢ²
I = ∑ mᵢrᵢ²
= ∑ mᵢ(rcm + r̃ᵢ)²
= ∑ mᵢ(rcm² + r̃ᵢ² + 2 rcmr̃ᵢ)
= (∑ mᵢrcm²) + (∑ mᵢr̃ᵢ²) + (∑ mᵢ 2 rcmr̃ᵢ)
^^^^^^^^ ^^^^^^^ ^^^^^^^^^^^^
Iorbit = Icm Ispin 0
Iorbit = ∑ mᵢrcm²
= rcm² (∑ mᵢ)
= rcm² m
= mrcm²
Ispin = ∑ mᵢr̃ᵢ²
rcm = (∑ mᵢrᵢ) / (∑ mᵢ)
∑ mᵢr̃ᵢ = ∑ mᵢ(rcm - rᵢ)
= (∑ mᵢ rcm) - ∑ mᵢrᵢ
= (rcm ∑ mᵢ) - ∑ mᵢrᵢ
= ∑ mᵢrᵢ - ∑ mᵢrᵢ
= 0
∑ mᵢ 2 rcmr̃ᵢ = 2 rcm (∑ mᵢr̃ᵢ)
= 0
剛體旋轉慣量(當轉軸穿過原點)。拆成兩項,軌道慣量與自旋慣量(公轉與自轉)。稱作平行軸定理parallel axis theorem。
旋轉中心改成轉軸,否則物體就散架了。半徑向量投影到轉軸的垂面。
半徑向量再改成質心與轉軸的距離d,導致數學式子每個變數都是相對位置,大可不必在意轉軸是否穿過原點。
數學符號標記方式截然不同,請務必小心。
I = md² + Icm
I = ∑ mᵢrᵢ² --> I = ∑ mᵢdᵢ²
= (mrcm²) + (∑ mᵢr̃ᵢ²) = md² + (∑ mᵢd̃ᵢ²)
I = (mrcm²) + (∑ mᵢr̃ᵢ²)
^^^^^ ^^^^^^^
md² Icm wikipedia and textbooks
大量質點旋轉動量(當旋轉中心位於原點)。拆成兩項,軌道動量與自旋動量(公轉與自轉)。
L = Lcm + ∑ r̃ᵢ × mᵢṽᵢ
L = ∑ rᵢ × mᵢvᵢ
= ∑ (rcm + r̃ᵢ) × mᵢvᵢ
= (∑ rcm × mᵢvᵢ) + (∑ r̃ᵢ × mᵢvᵢ)
^^^^^^^^^^^^^^ ^^^^^^^^^^^^^^
Lorbit = Lcm Lspin
Lorbit = ∑ rcm × mᵢvᵢ
= rcm × (∑ mᵢvᵢ)
= rcm × p
Lspin = ∑ r̃ᵢ × mᵢvᵢ
= ∑ r̃ᵢ × mᵢ(vcm + ṽᵢ)
= ∑ r̃ᵢ × (mᵢvcm + mᵢṽᵢ)
= (∑ r̃ᵢ × mᵢvcm) + (∑ r̃ᵢ × mᵢṽᵢ)
= 0 + (∑ r̃ᵢ × mᵢṽᵢ)
= ∑ r̃ᵢ × mᵢṽᵢ
∑ mᵢr̃ᵢ = 0
∑ r̃ᵢ × mᵢvcm = ∑ mᵢr̃ᵢ × vcm
= ∑ -vcm × mᵢr̃ᵢ
= -vcm × ∑ mᵢr̃ᵢ
= 0
剛體旋轉動量(當轉軸穿過原點)。拆成兩項,軌道動量與自旋動量(公轉與自轉)。稱作König's theorem。
L = d × p + Lcm
如法炮製
這些數學公式其實只是拆出一個常數項。這個手法也出現在機率論的期望值、變異數公式。
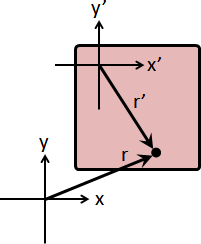
reference frame
參考系。更換座標系統。更換原點與座標軸。
甚至指定運動軌跡。原點與座標軸,隨著時間不斷變化。
中文翻譯不到位。直譯是參考框,含義是攝影機沿路跟拍。
參考系的主要用途是建立數學公式。
Euler's equation:旋轉運動,使用參考系。
Newton–Euler equation:平移運動、旋轉運動,使用參考系。
relative motion
相對運動。兩個質點的運動量差異。
文言文。剛體當中任意兩個質點A與B。B的運動量減去A的運動量,就是B相對於A的運動量。
白話文。參考系,原點定為A,座標軸定為標準座標軸。也就是說,剛體運動過程,各個時刻的畫面,各自將A平移至原點。然後再來觀察B的運動量。站在A,觀察B。剛體做平移運動,而B做相對平移運動,B相對平移速度是零。剛體做旋轉運動,而B做相對旋轉運動,B相對旋轉速度恰好等於剛體旋轉速度。
相對運動的主要用途是建立數學公式。推導過程源自這份講義。
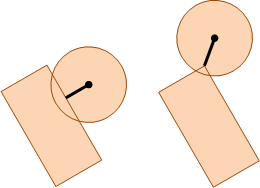
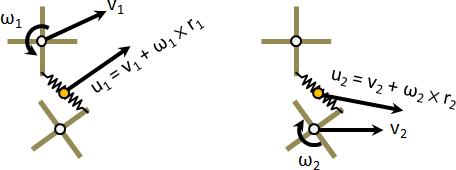
剛體質點速度。拆成兩項,平移速度與旋轉速度。
v = vₒ + ωₒ × rₒ
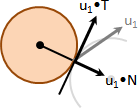
剛體質點加速度。拆成兩項,切線加速度與向心加速度(切線與法線)。
a = αₒ × rₒ + ωₒ × (ωₒ × rₒ)
rotating reference frame
旋轉參考系。參考系做等速自旋運動。
旋轉參考系的主要用途是地球自轉。在地球觀察物體運動,需要旋轉參考系。推導過程源自這份講義。
質點速度。拆成兩項,旋轉參考系質點速度與相對角速度。
vɪ = vʀ + (ω̃ × r̃)
[]ɪ: inertial reference frame
[]ʀ: rotating reference frame
r = rₓeₓ + re + re = sum rᵢeᵢ
r̃ = r̃ₓẽₓ + r̃ẽ + r̃ẽ = sum r̃ᵢẽᵢ
r = õ + r̃
[d/dt r]ɪ = [d/dt õ]ɪ + [d/dt r̃]ɪ
= [d/dt õ]ɪ + [sum (d/dt r̃ᵢ)ẽᵢ]ɪ + [sum r̃ᵢ(d/dt ẽᵢ)]ɪ
= [d/dt õ]ɪ + [d/dt r̃]ʀ + [ω̃ × r̃]ɪ
^^^^^^^^^ ^^^^^^^^^ ^^^^^^^^^ ^^^^^^^^
vɪ 0 vʀ ω̃ × r̃
質點加速度。拆成三項,旋轉參考系質點加速度、地轉偏向加速度、離心加速度。
aɪ = aʀ + 2(ω̃ × vʀ) + ω̃ × (ω̃ × r̃)
[d/dt vɪ]ɪ = [d/dt d/dt õ]ɪ + [d/dt vʀ]ɪ + [d/dt (ω̃ × r̃)]ɪ
^^^^^^^^^^^^^^ ^^^^^^^^^^ ^^^^^^^^^^^^^^^
[d/dt d/dt õ]ɪ = 0
[d/dt vʀ]ɪ = [d/dt vʀ]ʀ + [ω̃ × vʀ]ɪ
[d/dt (ω̃ × r̃)]ɪ = [(d/dt ω̃) × r̃]ɪ + [ω̃ × (d/dt r̃)]ɪ
= [α̃ × r̃]ɪ + [ω̃ × (vʀ + (ω̃ × r̃))]ɪ
= 0 + [ω̃ × vʀ]ɪ + [ω̃ × (ω̃ × r̃)]ɪ
[d/dt vɪ]ɪ = [d/dt vʀ]ʀ + [2(ω̃ × vʀ)]ɪ + [ω̃ × (ω̃ × r̃)]ɪ
^^^^^^^^^^ ^^^^^^^^^^ ^^^^^^^^^^^^ ^^^^^^^^^^^^^^
aɪ aʀ 2(ω̃ × vʀ) ω̃ × (ω̃ × r̃)
Coriolis acc. centrifugal acc.
angular momentum ≠ rotational momentum
物理教科書竄改了旋轉動量(角動量)的定義。
物理教科書將角動量直接定義為L=r×p。線動量乘以「線動量延長線到參考點的距離」,並且推廣成向量。參考點可以是任意點,不必是旋轉中心。參考點只有一個,不能設置多個。
角動量不再是旋轉動量!除非將參考點設於旋轉中心,而且物體只有一個!成為歷史共業。
angular momentum conversation
角動量守恆。指定任意一個參考點,每個質點的角動量,總和是定值。
注意到,這個定律並非在說「每個物體,各自計算旋轉動量,根據自身旋轉中心」,而是在說「所有物體使用同一個參考點計算角動量」。物理學家並未發現旋轉動量守恆,只發現角動量守恆。現實世界似乎也不存在旋轉動量守恆。
注意到,這個定律只適合用在單一質點平移、大量質點平移、單一物體旋轉,不適合用在大量物體旋轉。
couple
力偶。每個質點,各自受力,總和恰為零。
∑ Fᵢ = 0
指定參考點位置,可以求得角動量變化快慢(力矩)。
M = ∑ (rᵢ × Fᵢ)
力偶的重要性質:各種參考點位置,角動量變化快慢(力矩)皆相同。稱作Varignon's theorem。
M̃ = ∑ r̃ᵢ × F̃ᵢ
= ∑ r̃ᵢ × Fᵢ
= ∑ (rᵢ - õ) × Fᵢ
= ∑ (rᵢ × Fᵢ) - ∑ (õ × Fᵢ)
= ∑ (rᵢ × Fᵢ) - (õ × ∑ Fᵢ)
= ∑ (rᵢ × Fᵢ) - 0
= M
換句話說,不必煩惱參考點位置。
物體不適合使用力偶。一個質點受力之後,其他質點是否因此受力、受到多少力,我們無從得知。也就無法確認力偶。
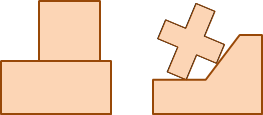
物體使用力偶,需要額外假設。假設施力不會轉移到其他質點、假設無視旋轉慣量。例如物體沒有厚度。槓桿定律law of the lever也隱含著類似的假設。真實世界的細棍、薄板,大致符合這些假設,得以使用力偶。
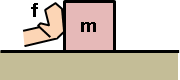
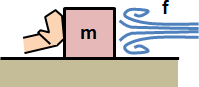
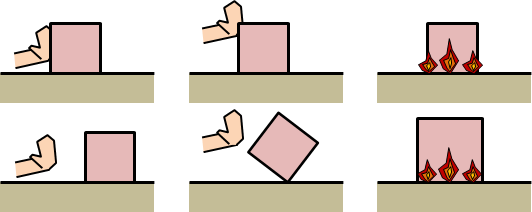
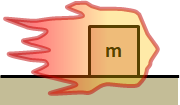
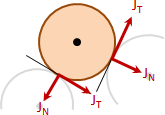
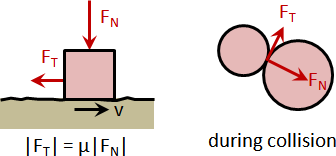
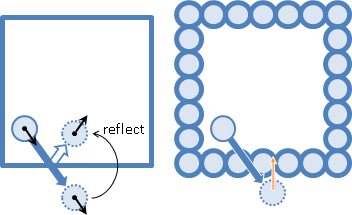
rigid body contact force
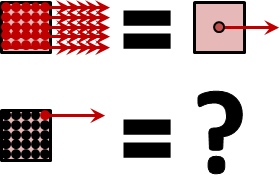
一、均勻施力於剛體的每個質點。
平移運動:根據數學的分配律,剛體平移動量化作質心平移動量,剛體平移速度化作質心平移速度。
旋轉運動:當旋轉中心是質心,力矩總和最小。根據最小作用量原理,旋轉中心是質心。依據是tennis racket theorem與parallel axis theorem,轉動慣量達到最小。
因此,剛體移動+剛體轉動=質心移動+質心轉動。
甚至進一步使用參考系,將原點位置設為質心位置。
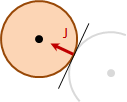
二、施力於剛體的一個質點。
平移動量與旋轉動量各占多少?如何求得旋轉中心?我不知道。
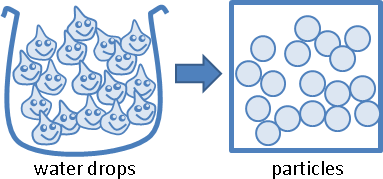
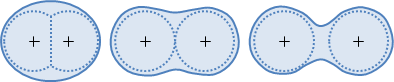
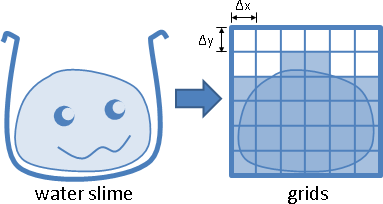
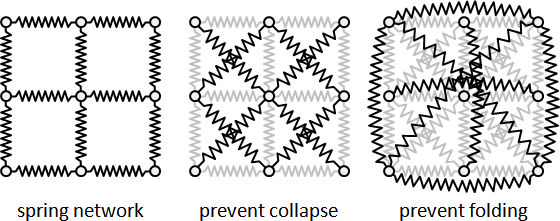
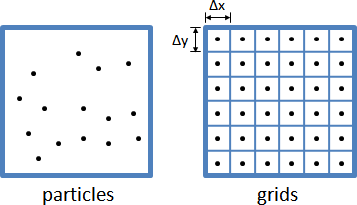
物理學家傾向採用另一套數學模型,請見柔體模擬章節。那套數學模型採用另一種世界觀,不存在所謂的剛體。
如果你堅持使用目前這套數學模型,那麼首先需要釐清剛體的各個質點如何互動。你必須自行腦補一些principle,進行二次創作,才能繼續談下去。
principle就好比是世界觀基本設定,精靈善弓、矮人善斧。principle是物理學家觀察真實世界而得到的經驗。principle可以想成是不太嚴謹的數學律。
以下介紹其中幾個principle,針對目前這套數學模型。
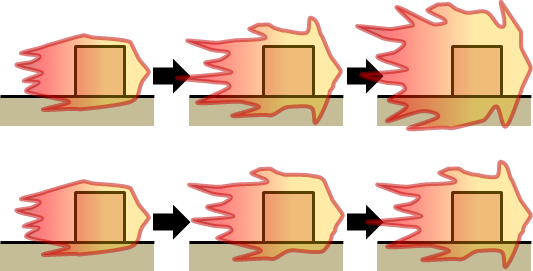
d'Alembert's principle
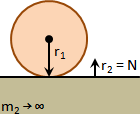
靜力平衡原理。
當物體動量不變,那麼任意位置的任意方向,合力為零。
物理學家根據此原理,設計出平移動量的定義。
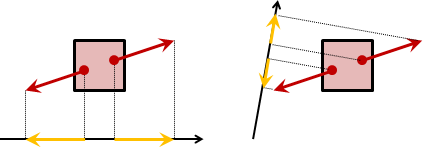
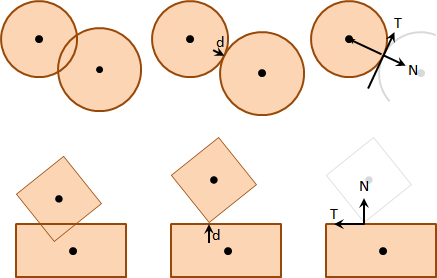
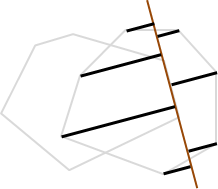
principle of transmissibility
施力可轉移原理。

更改施力位置,沿著施力正反方向,功效皆相同:一、動量變化皆相同。二、角動量變化皆相同(直線到參考點的距離是定值。)
物理學家根據此原理,設計出平移動量、角動量的定義。
注意到,這個原理並非在說「旋轉中心皆相同」。旋轉中心通常皆不同,旋轉中心通常不是質心。
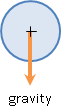
principle of least action
最小作用量原理。
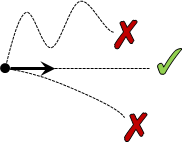
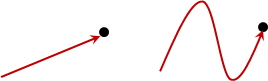
物質運動,總是選擇能量損失最少的軌跡。能省則省。
物質未受力,軌跡是直線。物質持續受力(例如重力),軌跡是拋物線。
物理學家根據此原理,設計出能量的定義。
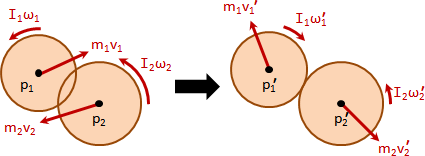
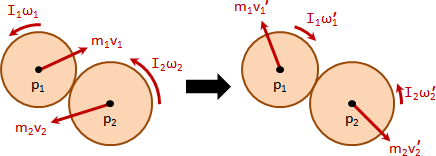
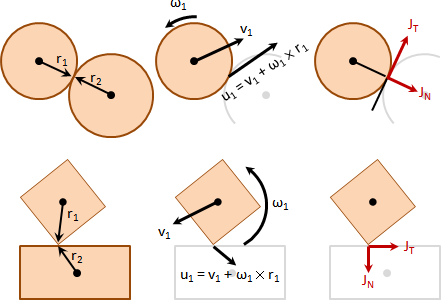
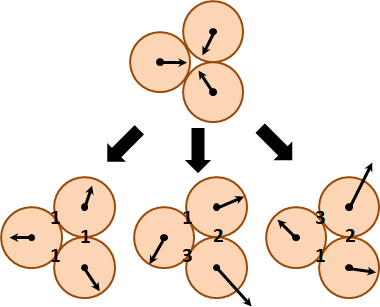
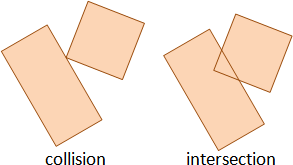
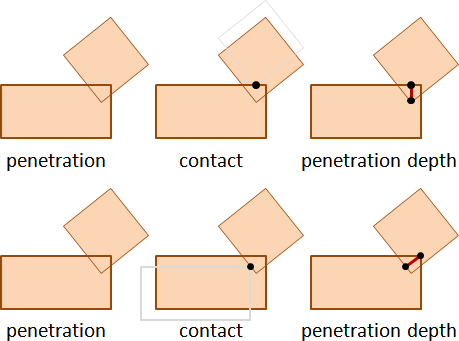
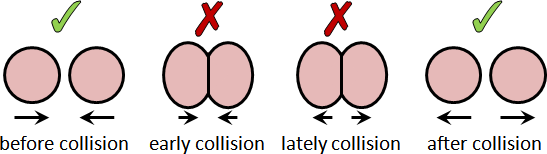
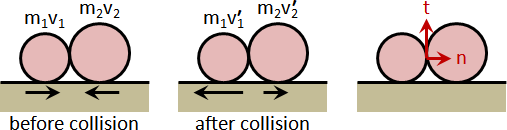
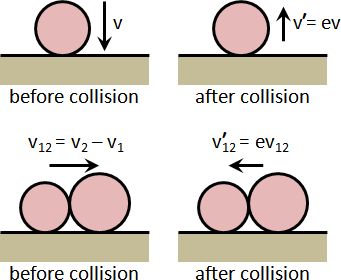
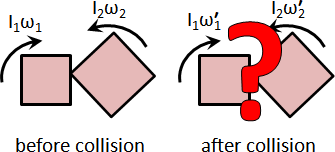
rigid body collision
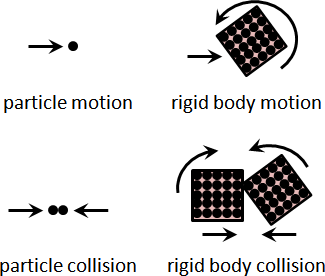
我翻閱了大量的力學書籍。我找到質點運動、剛體運動、質點碰撞,就是找不到剛體碰撞。有機會我再調查一下力學論文吧。
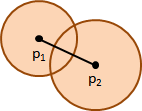
我搜尋了許多的網路論壇。我找到兩種解題策略:一、找到接觸位置,視作質點碰撞。反推旋轉中心。二、找到質心位置,視作質點碰撞。利用動量守恆、角動量守恆,解聯立方程式。
我認為這些解題策略都是二次創作。各有各的道理。





















{kind=link}
{kind=link}