separable ordinary differential equation:
⎛df⎞
A(f) B⎜——⎟ = c where B is identity functional
⎝dx⎠
in many textbooks,
(1) f is denoted by y.
(2) c is denoted by f.
(3) A is denoted by g.
(4) A(f) is moved to RHS.
that make things complicated.
(1) nth-order differentiable function
N次可微函數:處處N次可微。
(2) nth-order piecewise function
N次分段函數:銜接處N次可微,其餘處更高次可微。
(3) smooth function
平滑函數:處處無窮次可微。
(4) analytical function
解析函數:處處無窮次可微,且處處導數是泰勒級數。
(處處導數是無窮多項式函數,其輸入移位。)
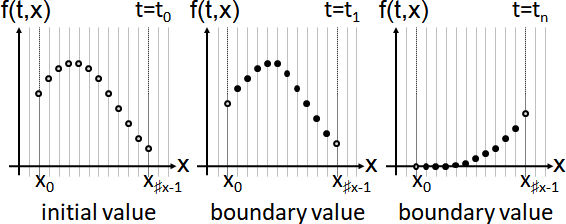
(1) differential equation
沒有特別取名。
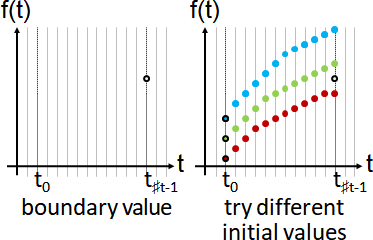
(2) initial value problem, IVP
初始值問題。已知初始值。
(3) boundary value problem, BVP
邊界值問題。已知邊界值。
微分方程式的基礎題型
一次微分方程式有兩種基礎題型。
(1) eigenproblem
f⁽ᴺ⁾(x) = f(x)
approach: exponential function
solution: linear combination of fudamental solutions
https://tutorial.math.lamar.edu/classes/de/bvpevals.aspx
(2) nonhomogeneous problem
f⁽ᴺ⁾(x) = b(x)
approach: Green's function
solution: convolution of Green's function and b(x)
https://en.wikipedia.org/wiki/Green's_function
exponential equation ḟ = f fₜ = f
phase rotation equation ḟ = 𝑖f fₜ = 𝑖f
??? f̈ = f fₜₜ = f
oscillator equation f̈ = -f fₜₜ = -f
未知函數只有一個輸入變數。可以是時間,也可以是空間。
exponential equation
「指數方程式」。快速增長或衰減。
ḟ = f,微分之後還是一樣。微分不動點。
ḟ = cf,添上倍率c。c>1是增長率,c<1是衰減率。
符號解是指數函數。
f(t) = f(0)exp(ct)
phase rotation equation
「相位旋轉方程式」。複數平面繞圈圈。
ḟ = 𝑖f,添上虛數𝑖。
ḟ = 𝑖ωf,添上角速度ω。
符號解是歐拉公式。
f(t) = f(0)exp(𝑖ωt)
= f(0)(cos(ωt) + 𝑖sin(ωt))
【尚無正式名稱】
現實世界似乎觀察不到此微分方程式。因此科學家沒有取名。
⎰ ṗ = kq
⎱ q̇ = kp
一式微分、代入二式,簡化為一道式子。
f̈ - k²f = 0
符號解是雙曲函數相加。A和B取決於初始條件。
f(t) = A exp(kt) + B exp(-kt)
= C cosh(kt) + D sinh(kt)
A + B = f(0) initial position
A - B = ḟ(0)/k initial velocity
A = (f(0) + ḟ(0)/k) / 2
B = (f(0) - ḟ(0)/k) / 2
C = f(0) initial position
D = ḟ(0)/k initial velocity
f(t) = A exp(𝑖kt) + B exp(-𝑖kt)
= C cos(kt) + D sin(kt)
= M cos(kt + Φ)
C = f(0) initial position
D = ḟ(0)/k initial velocity
M = |C+D𝑖| = sqrt(C²+D²) initial amplitude
Φ = -∠(C+D𝑖) = -tan⁻¹(D/C) initial phase
name | terminology | symbol
------------|----------------------|---------------------------
reaction | 0th-order derivative | written in functional R(f)
transport | 1st-order derivative | divergence ∇∙f
diffusion | 2nd-order derivative | Laplacian ∆f
source/sink | constant function | known function g
mg: gravity (force) vector
P: pressure (force per area) scalar
σ: stress (force per area) matrix
ρg: force density from gravity vector
∇P: force density from pressure vector
∇∙σ: force density from stress vector
∫ { ∂/∂t ρ + ∇∙(ρv) } dz = 0 integral
∂/∂t (ρh) + ∇∙(ρhv) = 0 ∫ρdz = ρh
∂/∂t h + ∇∙(hv) = 0 ρ is constant
第二式與第三式可以推導出知名公式P = ρgh。
ρ D/Dt v + ∂/∂z P + ρg = 0 z-axis of advection of velocity
D/Dt v = 0 hydrostatic balance
∂/∂z P + ρg = 0 subtraction
∂/∂z P = -ρg hydrostatic pressure distribution
P = -ρgz ρ and g are constants
P = ρgh unit_vector(h) = - unit_vector(z)
利用P = ρgh改寫第二式。
ρ D/Dt vₓ + ∂/∂x P + ρgₓ = 0 x-axis of advection of velocity
ρ D/Dt vₓ + ∂/∂x P = 0 gₓ = 0
ρ D/Dt vₓ + ∂/∂x (ρgh) = 0 P = ρgh
ρ D/Dt vₓ + ρg ∂/∂x h = 0 ρ and g are constants
D/Dt vₓ + g ∂/∂x h = 0 divides ρ
ρ D/Dt v + ∂/∂y P + ρg = 0 y-axis of advection of velocity
D/Dt v + g ∂/∂y h = 0
z軸0 + 0 = 0沒有意義。精簡成二維空間。
ρ D/Dt v + ∂/∂z P + ρg = 0 z-axis of advection of velocity
0 + 0 = 0
shallow water equations
淺水方程組有兩種寫法。接著介紹動量密度連續方程式。
⎰ ∂/∂t h + ∇∙(hv) = 0 conservation of mass
⎱ ∂/∂t (hv) + ∇∙(hv⊗v) + hg ∇h = 0 conservation of momentum
Coriolis force / geostrophic equations
https://www.youtube.com/watch?v=5y47Z8RPr30
https://www.youtube.com/watch?v=thiN9tix1Zc
http://nwafiles.nwas.org/digest/papers/1996/Vol21No1/Pg21-Billingsley.pdf
https://gfd.whoi.edu/wp-content/uploads/sites/18/2018/03/lecture8-harvey_136564.pdf
經典的微分方程式:thermodynamics
注意到前四項都不是微分方程式。作為先備知識,不得不講。
conservation of mechanical energy 能量守恆(粒子)
Bernoulli's equation 能量守恆(流體)
ideal gas equation of state 能量關係式
heat transfer formula 功關係式
fundamental equations of heat transfer 三種功定律
fundamental equations of thermodynamics 四種能量定律
(1) isobaric process: P = constant
(2) isochoric process: V = constant
(3) isothermal process: T = constant => Pρ = constant
(4) isentropic process: S = constant => adiabatic and reversible
(5) adiabatic process: Q = 0 => Pρ⁻ᵞ = constant
多變過程是這些過程的通用公式:等壓過程n=0,等容過程n=∞,等溫過程n=1,等熵過程n=γ。
polytropic process: PVⁿ = constant
heat transfer formula
順便介紹一些物理量。
專著《Thermodynamics: An Engineering Approach》。
總能=內能+機械能 total energy E = U + M
內能=顯熱+潛熱+鍵能+核能 internal energy U = ......
機械能=動能+位能+壓力能 mechanical energy M = ½mv² + mgh + PV
內能 internal energy U
外功 external work W
焓=熱能總和=內能+壓力能 enthalpy H = U + PV
熱=熱能差異=內能差異+外功 heat Q = ΔU + W
機械能觀點:能量=壓力X體積 P-V diagram energy = PV
熱能觀點:能量=溫度X熵 T-S diagram energy = TS
Fourier's law of heat conduction
Newton's law of cooling
Stefan–Boltzmann law of thermal radiation
熱傳導定律:熱轉移速度正比於溫差、正比於截面積、反比於距離。
Fourier's law of heat conduction:
∂/∂t Q = -k (A/l) ΔT
Fourier's law of heat conduction (per volume):
∂/∂t q = -k ∂/∂x T
Q: heat
q: heat density
k: thermal conductivity
A: area of cross section
l: distance
T: temperature
ΔT: difference of temperature
冷卻定律:熱轉移速度正比於環境溫差、正比於表面積。
Newton's law of cooling:
∂/∂t Q = hA(T - Tₑₙᵥ)
h: heat transfer coefficient
A: area of surface
T: temperature
Tₑₙᵥ: environment temperature
熱輻射定律:熱轉移速度正比於溫度四次方、正比於表面積。
Stefan–Boltzmann law of thermal radiation:
∂/∂t Q = σeAT⁴
σ: Stefan–Boltzmann constant
e: emissivity
A: area of surface
T: temperature
fundamental equations of thermodynamics
熱能有四種物理量:壓力p、體積V、溫度T、熵S。
因而衍生四種微分方程式。本文不會用到。請見維基百科。
經典的微分方程式:electrodynamics
動力學討論粒子運動。電動力學討論帶電粒子運動。
粒子附帶電荷,英文charged particle,中文帶電粒子。
electric force:
Coulomb's force
Lorentz's force
Abraham–Lorentz force
electrostatics:
Gauss's law
Coulomb's law
magnetostatics:
Ampère's law
Biot–Savart law
Ampère's force law
electromagnetic induction:
Ampère–Maxwell law
Faraday's law
electric energy:
Faraday's law
electrical resistivity and conductivity:
Ohm's law
Gauss's law:
∇∙E = ρ/ε₀ define ρ = q/V = ∂q/∂V (V is constant)
l length 長度 m
A area 面積 m²
V volume 體積 m³
q charge 電荷 C
ρ charge density 電荷密度 C/m³
F electric force 電力=力 N
E electric field 電場=電力/電荷 N/C
F∙A 電力通量 Nm²
E∙A electric flux 電通量 Nm²/C
∇∙E 電場散度 N/Cm²
ε₀ permittivity 真空電容率 Nm²/C²
of free space
Coulomb's law (force between two point charges):
F = kq₁q₂r̂/‖r‖² where k = 1/(4πε₀)
F: electric force 電力=力
q: electric charge 電荷
x: position 位置
r: displacement 移位
π: 3.14159... 圓周率
ε₀: permittivity of free space 真空電容率
或者簡單來說:球面的電力通量,在球心設置一個假想電荷。
FA = (1/ε₀)q² Gauss's law
∮FdA = F(4πr²) = (1/ε₀)q² surface integral over sphere
F = (1/ε₀)q²/(4πr²) = kq²/r² define k = 1/(4πε₀)
F = kq²r̂/‖r‖² scalar r → vector r
F = kq₁q₂r̂/‖r‖² test charge at sphere center
l length 長度 m
A area 面積 m²
V volume 體積 m³
q charge 電荷 C
ρ charge density 電荷密度 C/m³
j current density 電流密度 (C/m³)(m/s)
qB /人◕ ‿‿ ◕人\ N/(m/s)
B magnetic field 磁場 (N/C)/(m/s)
A×B 面積與磁場的叉積 (Nm²/C)/(m/s)
∇×B 磁場旋度 (N/Cm²)/(m/s)
μ₀ permeability 真空磁導率 Ns²/C²
of free space
Ampère's force law (force between two parallel currents):
F/L = μ₀I₁I₂/2πd
ρ: charge density 電荷密度
j: current density 電流密度
x: position 位置
r: displacement 移位=位置-位置
I: electric current 電流=電流密度X面積
π: 3.14159... 圓周率
μ₀: permeability of free space 真空磁導率
μ: electron mobility 電子遷移率
v: drift velocity 漂移速度=速度
j: current density 電流密度=每單位體積的電荷速度
ρ: charge density 電荷密度=每單位體積的電荷
n: charge carrier density 載子密度=每單位體積的載子
q: charge per carrier 每單位載子的電荷(不是之前的q)
經典的微分方程式:magnetohydrodynamics
集大成。
Maxwell's equations 電磁場
electromagnetic wave equation 電磁波
equation of motion of charged particle 電磁砲
induction equation 電磁牆
magnetohydrodynamic equations 電磁流
F = Fele + Fmag
F = qEele + qEmag define E = F/q
F = qE + q(v × B) Lorentz's law: Emag = v × B
F = q (E + v × B)
f = ρ (E + v × B) define f = F/V and ρ = q/V
f = ρE + (j × B) define j = ρv
∆B: magnetic diffusion 磁擴散
η: magnetic diffusivity 磁擴散率
原理:帶電粒子運動方程式、歐姆定律、安培定律、法拉第定律,四式聯立。
方便起見,捨棄安培-馬克士威定律,採用安培定律。省略的那一項,數值相對較小,無傷大雅。
⎧ F = q (E + v × B) equation of motion of charged particle
⎨ j = σ E Ohm's law
⎪ ∇×B = μ₀j Ampère's law
⎩ ∇×E = - ∂/∂t B Faraday's law
F = q (E + v × B) equation of motion of charged particle
Eeff = E + v × B effective electric field
j = σ (E + v × B) apply Ohm's law
∇×B = μ₀σ (E + v × B) apply Ampère's law
E = (1/μ₀σ) ∇×B - v × B
∇×((1/μ₀σ) ∇×B - v × B) = - ∂/∂t B apply Faraday's law
∂/∂t B + (1/μ₀σ) ∇×∇×B - ∇×(v×B) = 0
∂/∂t B - (1/μ₀σ) ∆B - ∇×(v×B) = 0 since ∇×∇×B = -∆B
F = q (E + v × B) equation of motion of charged particle
Eeff = E + v × B effective electric field
j = σ (E + v × B) apply Ohm's law
j/σ = E + v × B
0 = E + v × B perfect conductor: σ→∞
Lorentz force density:
j×B
force density from pressure:
∇(½(B∙B)/μ₀)
force density from stress:
(B∙∇B)/μ₀
force density from stress (under magnetostatics):
(B∙∇B)/μ₀ = ∇∙(B⊗B)/μ₀ when ∇∙B = 0
magnetic pressure:
½(B∙B)/μ₀
magnetic stress:
(B⊗B)/μ₀
∂/∂t ρs + ∇∙(ρsv) = 0 conservation of entropy
s = cᵥ ln(Pρ⁻ᵞ) + constant specific entropy
經典的微分方程式:electric circuit dynamics
引入網路。
capacitor: Volta's law of capacitance 電容器
inductor: Faraday's law of inductance 電感器
resistor: Ohm's law of resistance 電阻器
circuit: Kirchhoff's circuit laws 電路
RLC circuit: RLC circuit equations RLC電路
q(t) electric charge
v(t) voltage
i(t) electric current
電容器:其大小是電容C。其公式稱作伏打定律。
i(t) = C d/dt v(t) Volta's law of capacitance
⎰ v(t) = q(t) / C Volta's law of capacitance
⎱ i(t) = d/dt q(t) electric current
=> i(t) = C d/dt v(t)
電感器:其大小是電感L。其公式源自法拉第定律。
v(t) = L d/dt i(t) Faraday's law of inductance
⎰ 𝛷 = L i(t) Faraday's law
⎱ ℰ = - d/dt 𝛷 Lenz's law
=> ℰ = -L d/dt i(t)
=> v(t) = L d/dt i(t)
電阻器:其大小是電阻R。其公式源自歐姆定律。
v(t) = R i(t) Ohm's law of resistance
⎧ j = σE Ohm's law
⎨ V = ∫E·dl = El electric field
⎩ I = ∫j·dA = jA current density
(in uniformly charged straight wire)
=> V = Il/Aσ
=> V = IR let R = l/Aσ
=> v(t) = R i(t)
電路:電線添上電容器、電感器、電阻器、……各種電路元件,藉此調整電流和電壓。
電壓定律:迴路的所有電位差異總和為零。源自電荷守恆。
電流定律:節點的所有出入電流總和為零。源自電力平衡。
Kirchhoff's voltage law:
sum Vᵢ = 0 for every loop
Kirchhoff's current law:
sum Iᵢ = 0 for every junction
RLC電路:電阻器、電感器、電容器,各一個組成的電路。
此處討論串聯電路、並聯電路。源自電壓定律、電流定律。
series RLC circuit equation:
v(t) = L d/dt i(t) + R i(t) + (1/C) ∫i(t)dt
parallel RLC circuit equation:
i(t) = C d/dt v(t) + (1/R) v(t) + (1/L) ∫v(t)dt
series RLC circuit equation:
d/dt v(t) = L d²/dt² i(t) + R d/dt i(t) + (1/C) i(t)
parallel RLC circuit equation:
d/dt i(t) = C d²/dt² v(t) + (1/R) d/dt v(t) + (1/L) v(t)
經典的微分方程式:chemical kinetics
引入反應式。
(1) production / decay
(2) open system / close system
(3) Michaelis–Menten equation
(4) self-activation / self-repression
total derivative (in physics):
d d
—— f(t,x,v) = —— f(t(…), x(…), v(…)) everything can be input
dt dt t(…) = t(t,x,v,f,…)
d
= —— f(t(t), x(t), v(t)) select t as input
dt
dt ∂f dx ∂f dv ∂f dt
= —— —— + —— —— + —— —— where —— = 1
dt ∂t dt ∂x dt ∂v dt
input variables are everything. however,
if the coefficient is zero, then the derivative is zero.
Schrödinger's equation:
𝑖ℏ ∂/∂t ψ = Ĥ ψ
Schrödinger's equation:
Ê Ψ = Ĥ Ψ however energy operator does not exist
operator:
Ê = Ĥ however this is not a functional equation
physical quantity (at time t₀):
A
probability density function:
Ψ* A Ψ
expected value:
⟨A⟩ = ∫ Ψ* A Ψ dx
operator:
Â
現在觀察每個時刻的機率密度函數。寫成算子。
time-evolution function:
U(t)
where U is unitary i.e. U* U = I
U* is conjugate transpose of U
physical quantity (after some time t₀+t):
A(t) = U⁺(t) A U(t)
where U⁺ is pseudoinverse of U
A' = U⁺ A U is coordinate transformation
probability density function:
Ψ* U⁺(t) A U(t) Ψ dx
expected value:
⟨A(t)⟩ = ∫ Ψ* U⁺(t) A U(t) Ψ dx
operator:
Â(t)
「海森堡運動方程式」。機率密度函數對時間微分。寫成算子。
Heisenberg's equation of motion:
d/dt  = (𝑖/ℏ) [Â,Ĥ] + hat(∂/∂t A) skip (t)
where [A,B] is commutator
時間獨立:物理量不隨時間而變。守恆。
全微等於偏微:物理量運輸時不生不滅,但是有源匯。【尚待確認】
time-independent physical quantity:
∂/∂t A(t) = 0
time-independent operator:
A(t) = U⁺(t-t₀) A(t₀) U(t-t₀) for any t₀
time-independent Heisenberg's equation of motion:
d/dt  = (𝑖/ℏ) [Â,Ĥ]
e.g. position operator and momentum operator:
d/dt x̂ = (𝑖/ℏ) [x̂,Ĥ]
d/dt p̂ = (𝑖/ℏ) [p̂,Ĥ]
物理量守恆。
first integral:
[Â,Ĥ] = 0
e.g. conservation of mechanical energy:
[Ĥ,Ĥ] = 0
經典的微分方程式:singularity
符號解的特殊例外狀況。
(0) singularity 函數值不符合定義之處
loss of regularity 函數值不符合定義之處的產生
propagation of singularity 函數值不符合定義之處的傳播
常見的兩個細類。
(1) pole 函數值正負無限大之處
blowup 函數值正負無限大之處的產生
pole dynamics 函數值正負無限大之處的傳播
(2) jump 函數值不連續之處
breakdown 函數值不連續之處的產生
shock dynamics 函數值不連續之處的傳播
wave equation:
∂²/∂t² f(t,x) = c² ∂²/∂x² f(t,x)
harmonic ansatz:
f(t,x) = X(x) T(t)
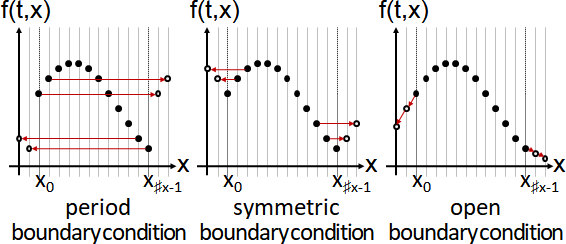
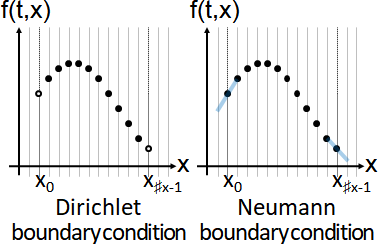
boundary condition:
f(t,0) = f(t,L) = 0 for all t
ḟ(0,x) = 0 for all x
fundamental solutions:
fₙ(t,x) = sin((nπ/L)x) cos((cnπ/L)t) n = 0,1,2,...
^^^^^^^^^^^^ ^^^^^^^^^^^^^ ^^^
spatial part temporal part trivial
= sin(kₙx) cos(ωₙt)
where kₙ = nπ/L is wave number
ωₙ = ckₙ = cnπ/L is angular frequency
boundary condition:
f(t,0) = f(t,L) = 0 for all t position is zero at endpoints
=> X(0) = X(L) = 0
=> k = nπ/L and A = 0 period = 2π/2 and phase = 0
n = 0,1,2,... (0 is trivial)
=> X(x) = B sin((nπ/L)x)
=> T(t) = C cos((cnπ/L)t) + D sin((cnπ/L)t)
solution (eigenmode):
f(t,x) = X(x) T(t)
= (B sin((nπ/L)x)) (C cos((cnπ/L)t) + D sin((cnπ/L)t))
= (B sin(kₙx)) (C cos(ωₙt) + D sin(ωₙt))
boundary condition:
ḟ(0,x) = 0 for all x
=> Ṫ(0) = 0
=> ⎰ C = T(0)
⎱ D = Ṫ(0)/kₙ = 0
=> ⎰ M = |C+D𝑖| = sqrt(C²+D²) = C
⎱ Φ = -∠(C+D𝑖) = -tan⁻¹(D/C) = 0
=> T(t) = C cos(ωₙt)
solution (eigenmode):
f(t,x) = (B sin(kₙx)) (C cos(ωₙt) + D sin(ωₙt))
= B sin(kₙx) M cos(ωₙt + Φ)
= B sin(kₙx) C cos(ωₙt)
= (BC) sin(kₙx) cos(ωₙt)
in wave equation,
harmonic solution <=> separation of variables
time-independent Schrödinger's equation:
⎰ 𝑖ℏ ∂/∂t ψ = Ĥ ψ
⎱ Ψ(t,x) = ψ(x) exp(-𝑖Et/ℏ)
where E = ℏω is energy (Planck's law)
solutions (eigenmodes):
ψ(x) = A sin(kₙx) n = 1,2,3,...
where kₙ = nπ/L is wave number
Eₙ = kₙ(ℏ²/2m) = (nπℏ)²/(2mL²) is energy eigenvalue
time-independent Schrödinger's equation:
⎰ 𝑖ℏ ∂/∂t ψ = Ĥ ψ
⎱ Ψ(t,x) = ψ(x) ϕ(t)
separation of variables:
⎰ ∂/∂t ϕ = (-𝑖Et/ℏ) ϕ exponential equation
⎱ E ψ = Ĥ ψ simplfied Schrödinger's equation
where E = (-𝑖/ℏ)(1/ϕ)(∂/∂t ϕ)
solution:
Ψ(t,x) = ψ(x) exp(-𝑖Et/ℏ) where |Ψ(t,x)|² = |ψ(x)|²
^^^^ ^^^^^^^^^^
spatial part temporal part
when potential energy U = 0,
time-independent Schrödinger's equation => Helmholtz's equation:
E ψ = T̂ ψ
=> E ψ = (-ℏ²/2m) ∂²/∂x² ψ
=> ∂²/∂x² ψ = (-2m/ℏ²) E ψ
=> ∂²/∂x² ψ = -k²ψ where k = sqrt(2mE) / ℏ
經典的微分方程式:linearization
有些經典的微分方程式,實施線性化,恰好退化成波動方程式。
shallow water wave equation 淺水波
acoustic wave equation 聲波
P: total pressure
P₀: static pressure (equilibrium pressure)
P̃: acoustic pressure (pressure perturbation)
ρ: total density
ρ₀: static density (equilibrium density)
ρ̃: density perturbation
c: propagation speed in medium
γ: ratio of specific heat capacity
momentum is the generator of translation
translation is the generator of momentum
https://en.wikipedia.org/wiki/Momentum_operator
https://physics.stackexchange.com/questions/153469/
nodal equilibrium equations 建築結構
Fourier–Biot heat conduction equation 熱能流動
equation of motion of vibration 物體運動
Lotka–Volterra equations 生態消長
Hodgkin–Huxley model 生理機制
van der Pol oscillator 電路雜訊
ₘ: membrane 細胞膜
ᴋ: potassium ion channel 鉀離子通道
ɴₐ: sodium ion channel 鈉離子通道
ₗ: leakage ion channel 洩漏離子通道
I: electric current 電流
V: electric potential 電位
C: capacitance per unit area 電容率
g: conductance per unit area 電導率
n: potassium channel subunit activation 鉀離子通道活化量
m: sodium channel subunit activation 鈉離子通道活化量
h: sodium channel subunit inactivation 鈉離子通道不活化量
α: forward transport rate 正向運輸率
β: backward transport rate 逆向運輸率
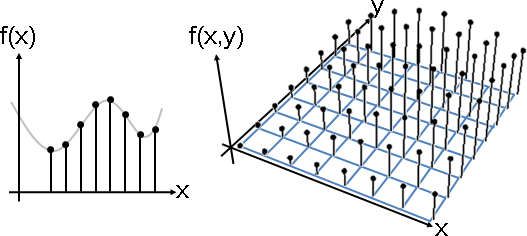
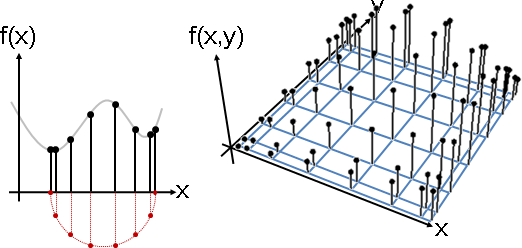
f(t) 5 ≤ t ≤ 10 time is an 1D interval
space is a 0D point
(spatial boundary is a point)
f(t,x) 5 ≤ t ≤ 10 time is an 1D interval
-10 ≤ x ≤ +10 space is an 1D interval
(spatial boundary is two endpoints)
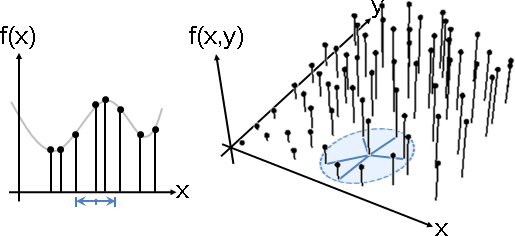
f(t,x,y) 5 ≤ t ≤ 10 time is an 1D interval
x² + y² ≤ 10 space is a 2D disk
(spatial boundary is a circle)
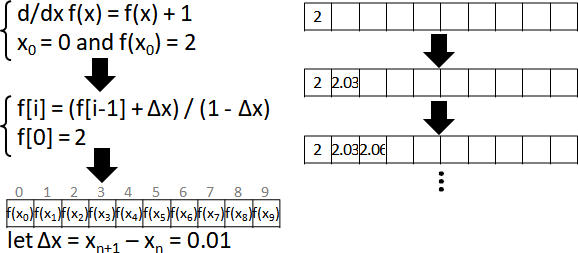
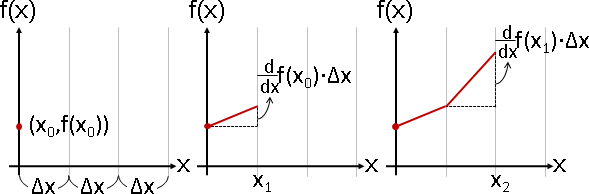
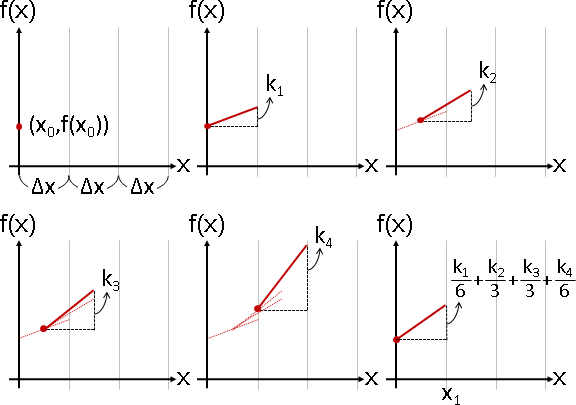
differential equation:
d
—— f(t) = t sqrt(f(t))
dt
implicit Euler method:
f[n+1] - f[n]
————————————— = (t₀ + n Δt) sqrt(f[n+1])
Δt
local linearization of function:
(first-order Taylor approximation at a)
f(x) = f(a) + f′(a) (x - a)
local linearization of sqrt(x):
sqrt(x) = sqrt(a) + sqrt′(a) (x - a)
where f(x) = sqrt(x) = x½
f′(x) = sqrt′(x) = ½ x-½
local linearization of differential equation:
d
—— f(t) = t (sqrt(a) + sqrt′(a) (f(t) - a))
dt
implicit Euler method:
f[n+1] - f[n]
————————————— = (t₀ + n Δt) (sqrt(a) + sqrt′(a) (f[n+1] - a))
Δt
where a = f[n]
隱式法。
fₙₑₓₜ[i][j] = f[i][j] + C laplace(fₙₑₓₜ[i][j])
簡寫成sum,比較清爽。
fₙₑₓₜ[i][j] = f[i][j] + C (sumₙₑₓₜ - 4 fₙₑₓₜ[i][j])
移項,新值通通挪至左式。
(1 + 4C) fₙₑₓₜ[i][j] - C sumₙₑₓₜ = f[i][j]
一次方程組 A fₙₑₓₜ = b,已知 A 和 b,求解 fₙₑₓₜ。
採用鬆弛法,得到計算公式。
fₙₑₓₜ[i][j] = (f[i][j] + C sum) / (1 + 4C)
dynamical system - numerical convergence
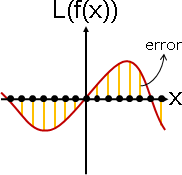
numerical error
數值誤差。數值遞推過程,符號解與數值解的差距。
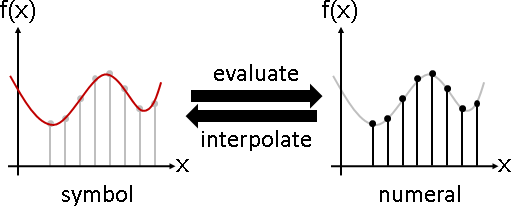
symbolic solution / numeric solution
符號解、數值解,畫成圖片。
符號解、數值解,其數學符號的正式寫法。
symbolic solution:
f(t, x) function
f(t₀ + n Δt, x₀ + i Δx) function value at a point
numeric solution:
f̃(t, x) function
f̃(t₀ + n Δt, x₀ + i Δx) function value at a point
數學符號可以精簡成各種風格。
symbolic solution:
f(t₀ + n Δt, x₀ + i Δx) --> f(tₙ, xᵢ) --> f⁽ⁿ⁾(xᵢ)
numeric solution:
f̃(t₀ + n Δt, x₀ + i Δx) --> f̃(tₙ, xᵢ) --> f̃⁽ⁿ⁾(xᵢ) ─╮
╭──────────────────╯
╰-> f[n][i] --> fᵢ⁽ⁿ⁾
local error / global error
數值誤差,分為兩個階段:
local error: distance of first iteration of
a symbolic solution and a numeric solution.
‖f⁽¹⁾ - f̃⁽¹⁾‖
global error: distance of nth iteration of
a symbolic solution and a numeric solution.
‖f⁽ⁿ⁾ - f̃⁽ⁿ⁾‖
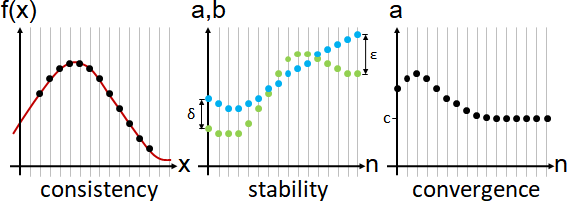
consistency: 1. theorems have no contradiction.
2. an equation have a unique solution.
3. symbol and numeral are asymptotically equal.
stability: two sequence are bounded by a certain distance
that is depending on initial distance
|aₙ - bₙ| < ε when |a₀ - b₀| < δ
where ε and δ are constants
convergence: a sequence leads to a constant.
aₙ → c when n → ∞
where c is a constant
differential equation:
L(f(t,x)) = 0
symbolic solution:
f(t,x)
discretization of differential equation:
L̃(f(t,x)) = 0
numeric solution:
f̃(t,x)
consistency: difference of the functional equation and
its discretization approaches zero.
L(f(t,x)) - L̃(f(t,x)) → 0 when Δt→0, Δx→0
stability: for two numeric solutions
with different initial conditions,
distance of each iteration is bounded.
‖f̃⁽ⁿ⁾ - g̃⁽ⁿ⁾‖ ≤ K ‖f̃⁽⁰⁾ - g̃⁽⁰⁾‖ when n≥0
where K is a constant
with consistency,
for a symbolic solution and a numeric solution
with same initial condition,
distance of each iteration is bounded.
‖f⁽ⁿ⁾ - f̃⁽ⁿ⁾‖ ≤ K ‖f⁽⁰⁾ - f̃⁽⁰⁾‖ when n≥0
where K is a constant
convergence: for two numeric solutions
with different initial conditions,
distance of each iteration leads to zero.
‖f̃⁽ⁿ⁾ - g̃⁽ⁿ⁾‖ → 0 when n→∞
with consistency,
for a symbolic solution and a numeric solution
with same initial condition,
distance of each iteration leads to zero.
‖f⁽ⁿ⁾ - f̃⁽ⁿ⁾‖ → 0 when n≥0
‖f̃⁽ⁿ⁺¹⁾‖ ≤ a ‖f̃⁽ⁿ⁾‖ linear time-invariance
a is a constant and 0 ≤ a ≤ 1
recurrence relation
以一個極簡範例作為開場白。
遞迴函數f(n) = a f(n-1) + b。展開遞迴函數,得到一般公式。每一項都有a的次方,觀察最高次方。當時刻n越來越大,為了避免數值解f(n)變成正負無限大,倍率a的絕對值必須小於1。
f(n) = a f(n-1) + b
f(n) = a (a f(n-2) + b) + b
f(n) = a (a (a f(n-3) + b) + b) + b
: :
f(n) = aⁿf(0) + aⁿ⁻¹b + aⁿ⁻²b + ... + a²b + ab + b
f(n) is bounded iff a < 1 when n→∞
遞迴函數f(n) = a f(n-1),則是小於等於1。
f(n) = a f(n-1)
f(n) = a (a f(n-2))
f(n) = a (a (a f(n-3)))
: :
f(n) = aⁿ f(0)
f(n) is bounded iff a ≤ 1 when n→∞
stability analysis with Fourier transform (von Neumann stability analysis)
當數值方案恰是線性遞迴函數,可以逐項轉換到頻域。
differential equation:
∂ ∂
—— f(t,x) + k —— f(t,x) = 0 k is a parameter
∂t ∂x
numerical scheme (forward-time central-space method):
f[n+1][i] = f[n][i] - ½ C (f[n][i+1] - f[n][i-1])
where C = k Δt / Δx is CFL number without absolute value
note: forward difference of t
central difference of x
Fourier transform:
DFT(f[n+1]) = DFT(f[n]) - ½ C (exp(+𝑖ωi) DFT(f[n])
- exp(-𝑖ωi) DFT(f[n]))
DFT(f[n+1]) = (1 - ½ C (exp(+𝑖ωi) + exp(-𝑖ωi)) DFT(f[n])
amplification factor:
a[i] = 1 - ½ C (exp(+𝑖ωi) - exp(-𝑖ωi))
a[i] = 1 - C 𝑖 sin(ωi)
stability condition:
a numerical scheme is stable iff |a[i]| ≤ 1
this numerical scheme is unstable since |a[i]| > 1
此例當中,採用FTCS method,無論如何不可能穩定。
修改數值方案,採用Lax–Friedrichs method,就有機會穩定。
numerical scheme (Lax–Friedrichs method):
f[n+1][i] = ½ (f[n][i+1] + f[n][i-1])
- ½ C (f[n][i+1] - f[n][i-1])
amplification factor:
a[i] = ½ (exp(+𝑖ωi) + exp(-𝑖ωi))
- ½ C (exp(+𝑖ωi) - exp(-𝑖ωi))
a[i] = cos(ωi) - C 𝑖 sin(ωi)
stability condition:
let |C| ≤ 1
thus |a[i]|² = cos²(ωi) + C² sin²(ωi)
≤ cos²(ωi) + sin²(ωi)
= 1
thus |a[i]| ≤ 1
a numerical scheme is stable iff |a[i]| ≤ 1
this numerical scheme is stable with stability condition |C| ≤ 1
f[n+1] = a f[n] where a = 1 / (1 - Δt)
a numerical scheme is stable iff |a| ≤ 1
this numerical scheme is stable iff Δt ≤ 0 and Δt ≥ 2
this numerical scheme is stable when Δt ≥ 2
f[n+1] = a f[n] where a = (1 + Δt)
a numerical scheme is stable iff |a| ≤ 1
this numerical scheme is stable iff Δt ≥ -2 and Δt ≤ 0
this numerical scheme is unstable since Δt > 0
function of absolute stability
數學家將a改寫成函數,叫做function of absolute stability,簡稱stability function。
舉例來說,下述微分方程式:
d
—— f(t) = f(t)
dt
套用implicit Euler method。
f[n+1] = a f[n] where a = 1 / (1 - Δt)
再將數值a換成函數φ(Δt)。
f[n+1] = φ(Δt) f[n] where φ(Δt) = 1 / (1 - Δt)
數學家甚至追加參數。微分方程式/數值方案附帶參數,判斷各種參數數值的穩定性。
舉例來說,下述微分方程式:
d
—— f(t) = k f(t) k is a parameter
dt
套用implicit Euler method。
f[n+1] = a f[n] where a = 1 / (1 - k Δt)
再將數值a換成函數φ(k Δt)。
f[n+1] = φ(k Δt) f[n] where φ(k Δt) = 1 / (1 - k Δt)
再將函數輸入k Δt換成z。形成函數φ(z)。
f[n+1] = φ(z) f[n] where φ(z) = 1 / (1 - z)
z = k Δt
k可以是複數。z可以是複數。
數學家描述複數,習慣使用符號z。我也採用z。
收縮穩定性是|φ(z)| ≤ 1。可以視作一條等高線之內或之外。
數學家描述等高線,習慣使用符號φ。我也採用φ。
diagram of absolute stability
有些教科書喜歡把stable region畫出來。此圖毫無實際用處,只是想讓讀者轉換心情。
舉例來說,下述微分方程式:
d
—— f(t) = k f(t) k is a parameter
dt
套用implicit Euler method,得到左圖。
套用explicit Euler method,得到右圖。
穩定區域|φ(z)| ≤ 1畫在複數平面。座標軸是z的實部虛部。
implicit Euler method:
k = a + b𝑖
z = k Δt
= (a + b𝑖) Δt
= (a Δt) + (b Δt)𝑖
Re[z] = a Δt is defined as x
Im[z] = b Δt is defined as y
φ(z) = 1 / (1 - z)
1/φ(z) = 1 - z
= 1 - k Δt
= 1 - (a + b𝑖) Δt
= (1 - a Δt) - (b Δt)𝑖
Re[1/φ(z)] = 1 - a Δt
Im[1/φ(z)] = -b Δt
|φ(z)| ≤ 1 contractive stability
=> |1/φ(z)| ≥ 1
=> |1/φ(z)|² ≥ 1
=> Re[1/φ(z)]² + Im[1/φ(z)]² ≥ 1
=> (1 - a Δt)² + (-b Δt)² ≥ 1
=> (1 + Re[z])² + (-Im[z])² ≥ 1
=> (1 + Re[z])² + Im[z]² ≥ 1
=> (1 - x)² + y² ≥ r²
=> outside a circle with center (1,0) and radius 1
explicit Euler method:
k = a + b𝑖
z = k Δt
= (a + b𝑖) Δt
= (a Δt) + (b Δt)𝑖
Re[z] = a Δt is defined as x
Im[z] = b Δt is defined as y
φ(z) = 1 + k Δt
= 1 + (a + b𝑖) Δt
= (1 + a Δt) + (b Δt)𝑖
Re[φ(z)] = 1 + a Δt
Im[φ(z)] = b Δt
|φ(z)| ≤ 1 contractive stability
=> |φ(z)|² ≤ 1
=> Re[φ(z)]² + Im[φ(z)]² ≤ 1
=> (1 + a Δt)² + (b Δt)² ≤ 1
=> (1 + Re[z])² + Im[z]² ≤ 1
=> (1 + x)² + y² ≤ r²
=> inside a circle with center (-1,0) and radius 1
此例當中,z = k Δt。k可能是複數,於是畫在複數平面、視作二維向量。Δt只能是實數,於是視作向量縮放倍率。
zero stability: |φ(z)| ≤ 1 when z → 0
absolute stability: |φ(z)| ≤ 1 for given z
A-stability: |φ(z)| ≤ 1 for all Re[z] ≤ 0
A-stability: {z : Re[z] ≤ 0} ⊆ {z : |φ(z)| ≤ 1}
L-stability: A-stability and (φ(z) → 0 as z → -∞)
數學家將線性遞迴函數改寫成特徵方程式,叫做characteristic polynomial of absolute stability,簡稱stability polynomial。
舉例來說,下述微分方程式:
微分方程式 d/dt f(t) = k f(t)
符號解 x = f(0) exp(k t)
數值方案 (a₀ f[n] + ... + aₘ f[n-m])
(多步法) = k Δt (b₀ f[n] + ... + bₘ f[n-m])
where a₀ = 1
特徵方程式 a(λ) = k Δt b(λ)
特徵方程式 a(λ) - k Δt b(λ) = 0
特徵方程式 k Δt = a(λ) / b(λ)
特徵多項式 π(λ, z) = a(λ) - z b(λ) where z = k Δt
特徵多項式分解 π(λ, z) = (λ - λ₁)...(λ - λₖ)
特徵多項式的根 r(z) = {λ : π(λ, z) = 0} = {λ₁, ..., λₖ}
數值解穩定性 |r(z)| ≤ 1
符號解穩定性 Re[z] ≤ 0
數學家利用r(z)定義穩定性。此例當中:
zero stability: |r(z)| ≤ 1 when z → 0
absolute stability: |r(z)| ≤ 1 for given z
A-stability: |r(z)| ≤ 1 for all Re[z] ≤ 0
L-stability: A-stability and r(z) → 0 as z → -∞
(1) Dahlquist's equivalence theorem
multistep method is convergent iff consistent and stable.
multistep method is stable iff it satisfies root condition.
[Dahlquist 1956]
(2) Dahlquist's stability theorem
implicit multistep method is A-stable with certain condition.
explicit multistep method is never A-stable.
[Dahlquist 1963]
(3) Dahlquist's order barrier theorem
implicit multistep method with m steps is at most
m+1 (m is odd) / m+2 (m is even) order accurate.
explicit multistep method with m steps is at most
m order accurate.
[Dahlquist 1978]
(4) Dahlquist's order barrier theorem
A-stable implicit multistep method is at most
second order accurate.
[Dahlquist 1963]
(1) Crank–Nicolson method
Euler method with fᵢ⁽ⁿ⁺¹⸍²⁾ = (fᵢ⁽ⁿ⁺¹⁾ + fᵢ⁽ⁿ⁾) / 2
for all i
(2) Du Fort–Frankel method
leapfrog method with fᵢ⁽ⁿ⁾ = (fᵢ⁽ⁿ⁺¹⁾ + fᵢ⁽ⁿ⁻¹⁾) / 2
numerical scheme:
hv[n+1][i][j] - hv[n][i][j]
———————————————————————————
Δt
hu[n][i+1][j] hu[n][i][j]
hv[n][i+1][j] ————————————— - hv[n][i][j] ———————————
h[n][i+1][j] h[n][i][j]
+ —————————————————————————————————————————————————————
Δx
hv[n][i][j+1] hv[n][i][j]
hv[n][i+1][j] ————————————— - hv[n][i][j] ———————————
h[n][i][j+1] h[n][i][j]
+ —————————————————————————————————————————————————————
Δy
½ g (h[n][i][j+1])² - ½ g (h[n][i][j])²
+ ——————————————————————————————————————— = 0
Δy
(skip the 1st and the 2nd equation)
水深h不可為負值(水深故意不歸零),速度u和v不可為無限大(水深歸零則速度也歸零)。
(1) height avoids negative value. (cutoff threshold)
if h < ε, then h = ε.
h = max(ε, h)
(2) velocity avoids division by zero.
if h < ε, then u = 0.
v = ⎰ (hv)/h , if h > ε
⎱ 0 , otherwise
where ε = 10⁻⁶
constant-coefficient advection equation:
∂ ∂
—— f(t,x) + k —— f(t,x) = 0 k is a parameter
∂t ∂x
forward-time central-space method:
f[n+1][i] = f[n][i] - ½ C (f[n][i+1] - f[n][i-1])
where C = k Δt / Δx is CFL number without absolute value
Lax–Friedrichs method:
1. f[n+1][i] = f̄[n][i] - ½ C (f̄[n][i+1] - f̄[n][i-1])
2. f̄[n+1][i] = f[n+1][i] + ½ (f̄[n][i+1] - 2 f̄[n][i] + f̄[n][i-1])
Lax–Friedrichs method:
f̄[n+1][i] = f̄[n][i] - ½ C (f̄[n][i+1] - f̄[n][i-1])
+ ½ (f̄[n][i+1] - 2 f̄[n][i] + f̄[n][i-1])
Lax–Friedrichs method:
f̄[n+1][i] = ½ (f̄[n][i+1] + f̄[n][i-1])
- ½ C (f̄[n][i+1] - f̄[n][i-1])
shallow water equations:
⎧ ∂/∂t h + ∂/∂x (hu) + ∂/∂y (hv) = 0
⎨ ∂/∂t u + u ∂/∂x u + v ∂/∂y u + g ∂/∂x h = 0
⎩ ∂/∂t v + u ∂/∂x v + v ∂/∂y v + g ∂/∂y h = 0
h: height
u: x velocity
v: y velocity
g: gravity (constant)
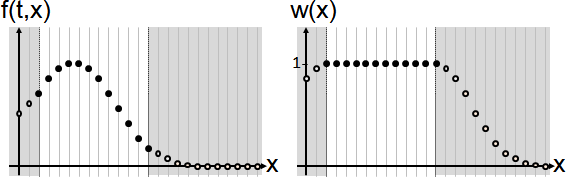
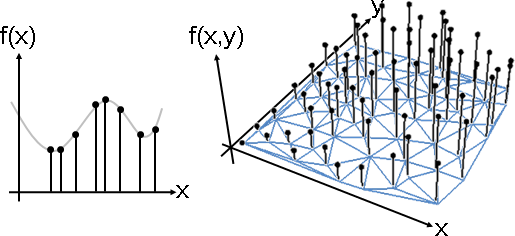
(1) shape function at samples forms Kronecker delta function.
φᵢ(xⱼ) = ⎰ 1 if i = j
⎱ 0 if i ≠ j
(2) sum of all shape functions equals 1.
sum φᵢ(x) = 1 for all x
ⁱ
(1) shape function at samples forms Kronecker delta function.
φᵢ(xⱼ) = ⎰ 1 if i = j
⎱ 0 if i ≠ j
(2) sum of all shape functions equals 1.
sum φᵢ(x) = 1 for all x
ⁱ
constant-coefficient advection equation:
∂ ∂
—— f(t,x) + k —— f(t,x) = 0 k is a parameter
∂t ∂x
semi-discretization (explicit Euler method):
f(t+Δt,x) - f(t,x) ∂
—————————————————— + k —— f(t,x) = 0
Δt ∂x
spectral method:
⎛ f(t+Δt,x) - f(t,x) ∂ ⎞
DFT⎜ —————————————————— + k —— f(t,x) ⎟ = 0
⎝ Δt ∂x ⎠
改寫成陣列:
(DFT(f[n+1]) - DFT(f[n])) / Δt + k (𝑖ωi/Δx) DFT(f[n]) = 0
DFT(f[n+1]) = (1 + C 𝑖ωi) DFT(f[n])
f[n+1] = IDFT((1 + C 𝑖ωi) DFT(f[n]))
where C = k Δt/Δx is CFL number without absolute value
𝑖 is imaginary unit
ω = 2π/N is fundamental angular frequency of DFT
i = (0, 1, ⋯, N-1) is a sequence from 0 to N-1
1 = (1, 1, ⋯, 1) is a sequence of 1s.
N is sampling number
[Rossby 1942]
Forecasting of flow patterns in the free atmosphere by
a trajectory method.
Basic Principles of Weather Forecasting, V. P. Starr
, pp.268-284 (appendix)
// initial condition
for each volume (x,y):
for (i = 0; i < f(t₀, x, y); i++):
create particle p
(pₓ, p) = sampling(x, y, i)
// time stepping
for (t = t₀; t <= tₙ; t += Δt):
// advection
for each particle p:
(pₓ, p) += velocity(t, pₓ, p) * Δt
// next frame
for each volume (x,y):
f(t+Δt, x, y) = total number of particles in (x,y)
for (t = t₀; t <= tₙ; t += Δt):
// current frame by sampling
delete all particles
for each volume (x,y):
for (i = 0; i < f(t,x,y); i++):
create particle p
(pₓ, p) = sampling(x, y, i)
// derivative of grid by finite difference
for each volume (x,y):
gradient(x,y) = ((f(t,x,y) - f(t,x-Δt,y)) / Δx,
(f(t,x,y) - f(t,x,y-Δt)) / Δy)
// derivative of particle by linear interpolation
for each particle p:
gradient(p) = gradient(round(pₓ; Δx), round(p; Δy))
// advection
for each particle p:
p = center of volume (x,y)
(pₓ, p) += velocity(t, pₓ, p; gradient) * Δt
// next frame
for each volume (x,y):
f(t+Δt, x, y) = total number of particles in (x,y)
(1) front tracking (particle)
等高線沿線取樣,形成粒子。
每回合每個粒子依照梯度向量場走一刻。
間距太近則刪除一點,間距太遠則插入新點。
(2) signed distance field (grid)
所有等高線改寫成一個有向距離場,形成格子。
每回合每個格子依照梯度向量場走一刻。
重新估計等高線位置,重新計算有向距離場。
redistancing:重新計算有向距離場,有兩種演算法。
(1) fast marching method
距離由近到遠,逐格更新距離。
(2) fast sweeping method
索引值由小到大,逐格更新距離,重複數遍。
形成Gauss–Seidel iteration。
ghost point:等高線外圍添加鬼點。先外插求得鬼點函數值,再內插求得等高線函數值。
Finite-difference ghost-point methods for PDE in complex geometries using level-sets
https://www.researchgate.net/publication/334643942
wet/dry:需要判斷乾溼。水深歸零稱作乾,反之稱作濕。
(1) wet–dry front tracking:找到乾濕交界之處。
(2) wet–dry transition:乾濕互動方式。
multivalued solution:等高線法可以用來處理多值解。
Multi-Valued Solution and Level Set Methods in Computational High Frequency Wave Propagation
https://faculty.sites.iastate.edu/hliu/files/inline-files/Liu-osher-tsai-CICP06_1.pdf
A Level Set Method for the Computation of Multivalued Solutions to Quasi-Linear Hyperbolic PDEs and Hamilton-Jacobi Equations
https://www.researchgate.net/publication/2855502
https://en.wikipedia.org/wiki/Viscosity_solution
https://benjaminmoll.com/wp-content/uploads/2019/07/viscosity_slides.pdf
In the case of hyperbolic systems, the notion of weak
solution based on distributions does not guarantee
uniqueness, and it is necessary to supplement it with
entropy conditions or some other selection criterion.
In fully nonlinear PDE such as the Hamilton–Jacobi
equation, there is a very different definition of weak
solution called viscosity solution.
Stanley Osher
https://link.springer.com/book/10.1007/b98879
James Sethian
https://math.berkeley.edu/~sethian/2006/Publications/Book/book.html
Hailiang Liu
https://faculty.sites.iastate.edu/hliu/
Ken Museth
https://ken.museth.org/Publications.html
Fronts Propagating with Curvature-Dependent Speed:
Algorithms Based on Hamilton-Jacobi Formulations
https://math.berkeley.edu/~sethian/Papers/sethian.osher.88.pdf
(1) particle is vorticity.
(2) calculate velocity field by Biot—Savart law.
summing the contributions of all particles.
(3) particle advection by velocity field.
updating the positions of particles.
(vorticity is constant for non-viscous fluid.)
(4) apply boundary condition.
space: structural set X
(set equipped with something)
metric: distance function d(∙,∙)
本站文件「measure」
metric space: space with metric (X,d(∙,∙))
subset: A ⊆ X
diameter: d = max(d(x,y)) for all x,y∈A
bounded subset: d < ∞
subset: A ⊆ X
center: x₀ ∈ A
radius: r
open ball: Bo(x₀,r) = {x⊆X: d(x₀,x) < r}
closed ball: Bc(x₀,r) = {x⊆X: d(x₀,x) ≤ r}
open subset: exist r>0 that Bo(x,r) ⊆ A for all x∈A
(A contains all neighbors of each x)
closed subset: complement Aᶜ = X-A is open
(for topological space X)
closure: cl(A), smallest closed subset contains A
dense subset: cl(A) = X
mapping: function from a metric space to another T:x→y
continuity: d(x,x₀) < δ => d(Tx,Tx₀) < ε for all x∈X
isometry: d(x,y) = d(Tx,Ty) for all x,y∈X
homeomorphism: bijective mapping T:x→y whose inverse is continuous
theorem: X and Y are both isometric => homeomorphic
contraction: d(Tx,Ty) ≤ α d(x,y) for all x,y∈X
where α<1 is real and constant
Banach theorem: iterative contractions converges to fixed point
sequence: (xₙ)
boundedness: sequence (xₙ) forms bounded subset
Cauchy sequence: d(xₘ,xₙ) < ε for all m,n ≥ N(ε) for all ε>0
(stronger boundedness, against the suffix)
sequence: (xₙ)
convergence: sequence (xₙ) leads to an unique limit in space
1. exist x∈X that d(xₙ,x) = 0 when n→∞
2. lim xₙ = x
n→∞
3. xₙ->x
theorem: 1. convergent => bounded and has unique limit
2. xₙ->x and yₙ->y => d(xₙ,yₙ)->d(x,y)
metric space: (X,d(∙,∙))
completeness: every sequence in X, if Cauchy then convergent.
(thus there exists a unique limit)
metric space: (X,d(∙,∙))
compactness: every sequence in X has a convergent subsequence
theorem: compact => closed and bounded
Bolzano–Weierstrass theorem / Heine–Borel theorem:
in ℝⁿ, compact <=> closed and bounded
normed space: space with norm (X,‖∙‖)
metric induced by the norm: d(x,y) = ‖x-y‖
Banach space: complete normed space
inner product space: vector space with inner product (X,⟨∙,∙⟩)
norm: ‖x‖ = √⟨x,x⟩
metric: d(x,y) = ‖x-y‖ = √⟨x-y,x-y⟩
Hibert space: complete inner product space
normed spaces: (X,‖∙‖) and (Y,‖∙‖)
linear function: T:X→Y
bounded linear function: ‖Tx‖ ≤ c‖x‖ for all x∈X
where c is real number
when x≠0: ‖Tx‖/‖x‖ ≤ c for all x∈X-{0}
an idea: smallest possible c <=> largest possible ‖Tx‖/‖x‖
operator norm: ‖T‖ = max ‖Tx‖/‖x‖
x∈X-{0}
example: integral operator T:C[0,1]→C[0,1]
y = Tx where y(t) = ∫₀¹k(t,τ)x(τ)dτ
(k is called kernel of T)
theorem: for finite dimension normed space (X,‖∙‖),
every linear function of X is bounded.
theorem: 1. if linear, then continuous = bounded
2. if linear, then single point continuous = continuous
3. xₙ->x => Txₙ->Tx
4. kernel(T) is closed
scalar field K (real number or complex number)
linear functional f:f→K
bounded linear functional: |f(x)| ≤ c‖x‖ for all x∈X
operator norm: ‖f‖ = max |f(x)|/‖x‖ = max |f(x)|
x∈X-{0} ‖x‖=1
example: 1. dot product f(x) = x∙a
2. definite integral f(x) = ∫ₐᵇ x(t)dt (‖f‖ = b-a)
3. C[a,b]
4. L²(Ω)
(1) Riesz representation theorem:
every bounded linear functional f on Hibert space (H,⟨∙,∙⟩)
can be represented as inner product.
f(x) = ⟨x,z⟩ where ‖z‖ = ‖f‖
z is uniquely determined on h
(2) Lax–Milgram representation theorem:
every bounded sesquilinear function h on Hibert space (H,⟨∙,∙⟩)
can be represented as sesquilinear form
h(x,y) = ⟨Sx,y⟩ where ‖S‖ = ‖h‖
bounded linear function S:X→Y is uniquely determined by h
bilinear function: h:X×Y→ℝ with linearity
sesquilinear function: h:X×Y→ℂ with conjugate linearity
operator norm: ‖h‖ = max |h(x,y)|/‖x‖‖y‖ = max |h(x,y)|
x∈X-{0} ‖x‖=1
y∈Y-{0} ‖y‖=1
(3) Riesz representation theorem on C[a,b]:
every bounded linear functional f on C[a,b]
can be represented as Riemann–Stieltjes integral
f(x) = ∫ₐᵇ x(t)dw(t) where ‖w‖ᴛᴠ = ‖f‖
partition on [a,b]: sequence (xₙ) that a = x₀ < ... < xₙ = b
total variation: ‖w‖ᴛᴠ = sup sum |w(xᵢ) - w(xᵢ₋₁)|
(xₙ) i=1⋯n
(total vertical distance of running up and down)
Banach space: X
normed space: Y
bounded linear function: T:X→Y
sequence of bounded linear function: (Tₙ)
uniform boundedness theorem:
‖Tₙx‖ ≤ cx for all x∈X for all n => ‖Tₙ‖ ≤ c for all n
(output Tₙx is bounded => function T is bounded)
sequence (xₙ) on normed space (X,‖∙‖)
1. strong convergence: exist x∈X that lim ‖xₙ-x‖ = 0
2. weak convergence: exist x∈X that lim f(xₙ) = f(x)
theorem: for finite dimension, strong = weak
sequence of functions (Tₙ)
1. uniform convergence: ‖Tₙ - T‖ -> 0
2. strong convergence: ‖Tₙx - Tx‖ -> 0 for all x∈X
3. weak convergence: ‖f(Tₙx) - f(Tx)‖ -> 0 for all x∈X and f∈Y'
theorem: 1 => 2 => 3
normed vector spaces (X,‖∙‖) and (Y,‖∙‖)
function: T:X→Y
compact function: for every sequence (xₙ)∈X,
(Txₙ)∈Y has a convergent subsequence
compact linear function: 1. T is linear
2. for every bounded subset M⊆X,
image T(M)⊆Y is relatively compact
(closure cl(T(M))⊆Y is compact)
example: Fredholm alternative
(T-λI) x(s) = y(s) where Tx(s) = ∫ₐᵇ k(s,t)x(t) dt
where λ is a parameter
kernel k(s,t) is known
x(t) is unknown
theorem: if linear compact, then bounded => continuous
theorem: when dim(x) = ∞, identity I:X→X is not linear compact
when dim(T(x)) < ∞, bounded => linear compact
when dim(x) < ∞, always linear compact
theorem: if T is linear compact
and xₙ is weakly convergent f(xₙ) -> f(x)
then Txₙ is strongly convergent Txₙ -> Tx
theorem: if (Tₙ) are linear compact
and (Tₙ) is uniform convergence ‖Tₙ - T‖ -> 0
then T is linear compact
compact nonlinear function:
https://math.stackexchange.com/questions/2521144/
theorem: linear function is continuous iff
it maps bounded sets to bounded sets.
sequential compactness theorem:
https://en.wikipedia.org/wiki/Bolzano–Weierstrass_theorem
sequence: (xₙ)∈C[a,b]
bounded sequence: |xₙ(s)| < ε for all (xₙ) and s∈[a,b]
equicontinous sequence: exist δ>0 depends only on ε
|s₁-s₂| < δ => |xₙ(s₁)-xₙ(s₂)| < ε
for all (xₙ) and s₁,s₂∈[a,b]
Arzelà–Ascoli compactness theorem:
bounded equicontinous sequence (xₙ)∈C[a,b]
has a convergent subsequence (in the norm on C[a,b])
example: compact integral function
function T:X→X that (Tx)(s) = ∫ₐᵇ k(s,t)x(t) dt
where J=[a,b] is compact
k(s,t) is continuous on J×J
x(t)∈C[a,b] is linear compact
Lebesgue integral vs. Riemann integral
https://math.stackexchange.com/questions/4638267/
bounded linear functional f on C[a,b]
metric induced by the norm ‖f‖∞ = max |f(x)| is complete
x∈[a,b]
metric induced by the norm ‖f‖₁ = ∫ₐᵇ |f(x)| dx is not complete
counterexample here:
https://books.google.com.tw/books?id=bvuRuwuFBWwC&pg=PA13
To make ‖f‖₁ complete, mathematicians introduce
"measurable function" and "Lebesgue integral".
set: X
power set: 𝒫(X), a set that is all subsets of X
algebra: M⊆𝒫(X), a set that is some subsets of X
1. ∅ ∈ M and X ∈ M
2. A ∈ M => Aᶜ = X-A ∈ M
3. A₁, ⋯, Aₙ ∈ M => A₁ ∪ ⋯ ∪ Aₙ ∈ M
σ-algebra: M⊆X
4. A₁, A₂, ⋯ ∈ M => A₁ ∪ A₂ ∪ ⋯ ∈ M
(extend to infinite)
measurable space: space with σ-algebra (X,M)
positive measure: μ:A→[0,∞]
1. positivity: μ(A) ≥ 0 for all A∈M
2. σ-addivity: μ( ⋃ Aᵢ) = ∑ μ(Aᵢ) (may not converge)
i=1⋯∞ i=1⋯∞
finite measure: μ:A→[0,∞]
3. boundedness: μ(A) < ∞ for all A∈M
(the stronger version that is not approved)
σ-finite measure: μ:A→[0,∞]
3. exist countable set {Aₙ} / sequence (Aₙ)
where A₁, A₂, ⋯ ∈ M and A₁ ∪ A₂ ∪ ⋯ = X
such that μ(Aᵢ) < ∞ for i=1⋯∞
(the weaker version that is minimum criterion)
measure space: measurable space with σ-finite measure (X,M,μ)
two measurable space with σ-finite measure: (X,M,μ) and (Y,N,μ)
measurable function: f:X→Y that f⁻¹(A)∈M for all A∈N
simple measurable function: f:X→ℂ that μ({x∈X|f(x)≠0}) < ∞
integrable measurable function: f:X→[0,∞] that ∫X f dμ < ∞
measure space: (X,M,μ)
sequence of measurable functions: (fₙ)
(fₙ) is positive monotone: 0 ≤ f₁ ≤ f₂ ≤ ⋯
monotone convergence theorem:
when (fₙ) is positive monotone,
fₙ(x) -> f(x) => ∫ fₙ dμ -> ∫ f dμ
in other words,
lim fₙ(x) = f(x) for all x∈X => lim ∫ fₙ dμ = ∫ lim fₙ dμ
n→∞ n→∞ n→∞
sequence of measurable functions: (fₙ)
integrable measurable function: g
(fₙ) are dominated by g: |fₙ(x)| ≤ g(x) for all n
dominated convergence theorem:
when (fₙ) are dominated by g,
fₙ(x) -> f(x) => ∫ fₙ dμ -> ∫ f dμ
in other words,
lim fₙ(x) = f(x) for all x∈X => lim ∫ fₙ dμ = ∫ lim fₙ dμ
n→∞ n→∞ n→∞
ChatGPT
Arzelà–Ascoli compactness theorem:
a sequence {uₙ}
1. uniformly bounded
‖uₙ(x)‖ < M for all n and x
2. uniformly equicontinuous
‖uₙ(x) - uₙ(y)‖ < ε when ‖x - y‖ < δ for all n and x
then exist a subsequence of {uₙ} that uniformly converges to u
‖uₙ(x) - u(x)‖ → 0 for all x when n→∞
dominated convergence theorem:
a sequence {uₙ}⊂L¹(Ω)
1. uniformly bounded by v in L¹
‖uₙ(x)‖ < v(x) for all n and x where v⊂L¹(Ω)
2. uniformly converges to u in Lᵖ
‖uₙ(x) - u(x)‖ → 0 for all x when n→∞
then sequence {uₙ} converges to u in L¹
‖uₙ - u‖₁ → 0 when n→∞
uniform convergence vs. pointwise convergence
https://math.stackexchange.com/questions/597765/
stackoverflow
Lᵖ(Ω) ⊂ L𐞥(Ω) if p > q
https://math.stackexchange.com/questions/18395/
https://math.stackexchange.com/questions/271658/
BV(Ω) ⊂ L¹(Ω)
BV(Ω) ⊂ L∞(Ω) (only in 1D)
https://math.stackexchange.com/questions/2418741/
https://math.stackexchange.com/questions/1372555/
Lᵖ-Lipschitz <=> L𐞥-Lipschitz if p < q < ∞
Lᵖ-Lipschitz => L∞-Lipschitz
Lᵖ-convergence => L𐞥-convergence if p > q
https://math.stackexchange.com/questions/782558/
https://math.stackexchange.com/questions/1529156/
Banach space complete normed space, e.g. Lᵖ(Ω)
Fréchet space with semi-norm and metric
Hibert space L²(Ω) with inner product
⟨f,g⟩ = ∫Ωf(x)g(x)dx
Hölder's inequality ∫Ω|f(x)g(x)|dx ≤ ‖f‖Lᵖ(Ω)‖f‖L𐞥(Ω)
where 1/p + 1/q = 1
Lebesgue space p次方和仍受限的函數
Lᵖ(Ω) = {f:Ω→ℝ | ∫Ω|f(x)|ᵖdx < ∞}
norm
‖f‖Lᵖ(Ω) = (∫Ω|f(x)|ᵖdx)¹⸍ᵖ
space of locally integrable functions 積分範圍只考慮連通受限區域
Lᵖloc(Ω) = {f∈Lᵖ(K) ∀K⊂⊂Ω}
relatively compact (compact and contained by)
K⊂⊂Ω
Sobolev space 微分1次到微分α次,p次方和仍受限的函數。
Wᵏ⸴ᵖ(Ω) = {u∈Lᵖ(Ω) | Dαu∈Lᵖ(Ω), ∀|α|≤k}
norm
‖u‖Wᵏ⸴ᵖ(Ω) = (sum|α|≤k ‖Dαu‖Lᵖ(Ω)ᵖ)¹⸍ᵖ
space of functions of bounded variation 升降高度總和受限
BV(Ω) = {f∈L¹(Ω) | ‖f‖ᴛᴠ < ∞}
total variation
‖f‖ᴛᴠ = sup sum |f(xᵢ) - f(xᵢ₋₁)|
x₀<⋯<xₙ 1⋯n
Corollary 5.2
一個函數序列uₙ(t,x),屬於Sobolev space W¹¹:
每個函數,每個時刻,本身、對空間微分、對時間微分,三者的L¹同時受限。
那麼可以找到一個函數子序列:
TV受限、L¹受限、L¹平緩、Lᵖloc逐點收斂至特定函數
Theorem 5.6 BV compactness theorem [Helly]
A sequence {uₙ}⊂BV(Ω) with uniformly bounded TV and L∞
has a subsequence that converges to u in Lᵖloc.
1. linear functional L on Banach space B is continuous
iff it is bounded |L(v)| ≤ C‖v‖ʙ for all v∈B
2. bounded continuouos linear function = Lipschitz
|L(u) - L(v)| = |L(u-v)| ≤ C‖u-v‖ʙ for all u,v∈B
3. dual space of a Banach space:
any function g ∈ L𐞥(Ω) can be viewed as
a continuous linear functional F ∈ Lᵖ(Ω)
F: v -> ∫Ωu(x)v(x)dx
where 1/p + 1/q = 1
4. dual norm:
operator norm on the dual space X*
‖F‖X* = sup |F(x)|
‖x‖X=1
5. Riesz representation theorem:
any continuous linear functional L on Hibert space H
can be represented uniquely as L(v) = ⟨u,v⟩ for some u∈H.
moreover, ‖L‖ʜ* = ‖u‖ʜ.
6. bilinear form a(∙,∙) on normed linear space H
is bounded: |a(u,v)| ≥ C‖u‖ʜ‖v‖ʜ
is coercive: |a(u,v)| ≥ α‖u-v‖ʜ²
7. Lax–Milgram theorem:
a Hibert space (V,⟨∙,∙⟩)
a continuous linear functional F ∈ V*
a continuous coercive bilinear form a(∙,∙)
there exists a unique u∈V such that
F(v) = a(u,v) for all v∈V
moreover, ‖F‖ʜ* ≥ α‖u‖ʜ
exponential decay equation:
d
—— f(t) = k f(t) k is a parameter and k < 0
dt
explicit Euler method:
fᵢ⁽ⁿ⁺¹⁾ - fᵢ⁽ⁿ⁾
——————————————— = k fᵢ⁽ⁿ⁾
Δt
fᵢ⁽ⁿ⁺¹⁾ = (1 + Δt k) fᵢ⁽ⁿ⁾
diminishing if (1 + Δt k) ≤ 1
diminishing數學定理
一、針對齊次數值方案,收縮則遞減。
證明很簡單。當數值方案沒有常數項,則數值解可以是零。零作為減數,那麼收縮導致遞減。
for homogeneous scheme,
contraction => diminishing
二、針對線性數值方案,收縮即是遞減即是指數衰減。
證明很簡單。兩個數值解相加減,依然形成數值解,數學性質依然成立。
for homogeneous linear scheme,
contraction <=> diminishing <=> exponential decay
order preservation
「保序」。兩種數值解每回合差距保持非負數。
g⁽ⁿ⁾ - f⁽ⁿ⁾ ≥ 0 => g⁽ⁿ⁺¹⁾ - f⁽ⁿ⁺¹⁾ ≥ 0
order preservation數學定理
數值解保序=數值方案是遞增函數(任一變數皆遞增)。
證明省略。
order preservation <=> increasing function
order preservation (monotonicity)
兩種數值解每回合差距保持非負數
g⁽ⁿ⁾ - f⁽ⁿ⁾ ≥ 0 => g⁽ⁿ⁺¹⁾ - f⁽ⁿ⁺¹⁾ ≥ 0
<=> order preservation (monotonicity)
兩種數值解每回合保持高低關係
f⁽ⁿ⁾ ≤ g⁽ⁿ⁾ => f⁽ⁿ⁺¹⁾ ≤ g⁽ⁿ⁺¹⁾
<=> increasing function
數值方案是遞增函數(任一變數皆遞增)
⎰ fᵢ⁽ⁿ⁺¹⁾ = Fᵢ(fⱼ₁⁽ⁿ⁾, ... , fⱼₘ⁽ⁿ⁾)
⎱ fⱼₖ⁽ⁿ⁾ ≤ gⱼₖ⁽ⁿ⁾ => fᵢ⁽ⁿ⁺¹⁾ ≤ gᵢ⁽ⁿ⁺¹⁾ for all 1 ≤ k ≤ m
linear
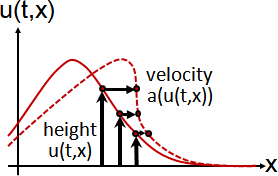
conservation law ∂/∂t u(t,x) + a ∂/∂x u(t,x) = 0
initial condition u(0,x) = u₀(x)
solution u(t,x) = u₀(x - at)
waveform u(t,x) at time t
wave speed a = constant
rightward a > 0
leftward a < 0
static a = 0
wavefront x - at = constant
characteristics dx/dt = a
for scalar conservation law in one-dimensional space,
(1) weak solution
<=> Rankine–Hugoniot jump condition
(2) entropy solution
<=> Rankine–Hugoniot jump condition
& Oleĭnik entropy condition
(3) entropy solution when f is strictly convex
<=> Rankine–Hugoniot jump condition
& Lax entropy condition
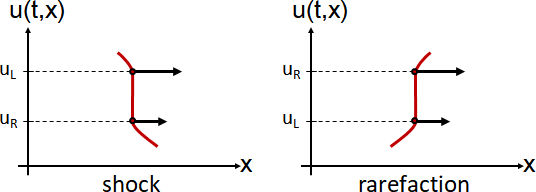
two types of entropy solution of Riemann problem:
(1) shock wave: compression of characteristic curves
a(uʟ) ≥ a(uʀ)
(2) rarefaction wave: expansion of characteristic curves
a(uʟ) ≤ a(uʀ)
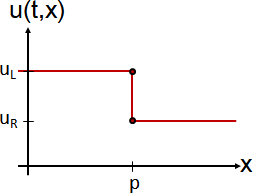
Riemann initial condition:
u(0,x) = ⎰ uʟ , if x < 0
⎱ uʀ , if x > 0
entropy-satisfying shock wave:
u(t,x) = ⎰ uʟ , if x < st
⎱ uʀ , if x > st
where s is speed of discontinuous position
s = (f(uʀ) - f(uʟ)) / (uʀ - uʟ)
entropy-satisfying rarefaction wave:
u(t,x) = ⎧ uʟ , if x ≤ a(uʟ)t
⎨ u* , if x = a(u*)t and uʟ ≤ u* ≤ uʀ
⎩ uʀ , if x ≥ a(uʀ)t
Finite volume methods: foundation and analysis
https://ivv5hpp.uni-muenster.de/u/mohlb_01/postscript/finvol_script.pdf
Convergence of approximate solutions of conservation laws
https://www.igpm.rwth-aachen.de/Download/reports/pdf/IGPM217.pdf
Finite volume schemes and Lax–Wendroff consistency
https://hal.science/hal-03257774v2/document
linear conservation law:
∂ ∂
—— u(t,x) + a —— u(t,x) = 0
∂t ∂x
forward-time backward-space method:
uᵢ⁽ⁿ⁺¹⁾ = uᵢ⁽ⁿ⁾ - C (uᵢ⁽ⁿ⁾ - uᵢ₋₁⁽ⁿ⁾)
forward-time forward-space method:
uᵢ⁽ⁿ⁺¹⁾ = uᵢ⁽ⁿ⁾ - C (uᵢ₊₁⁽ⁿ⁾ - uᵢ⁽ⁿ⁾)
upwind difference method:
uᵢ⁽ⁿ⁺¹⁾ = ⎰ uᵢ⁽ⁿ⁾ - C (uᵢ⁽ⁿ⁾ - uᵢ₋₁⁽ⁿ⁾) , if a > 0
⎱ uᵢ⁽ⁿ⁾ - C (uᵢ₊₁⁽ⁿ⁾ - uᵢ⁽ⁿ⁾) , if a < 0
where C = a Δt / Δx is CFL number without absolute value
conservation law:
∂ ∂
—— u(t,x) + —— f(u(t,x)) = 0
∂t ∂x
upwind difference method:
uᵢ⁽ⁿ⁺¹⁾ = ⎰ uᵢ⁽ⁿ⁾ - λ (f(uᵢ⁽ⁿ⁾) - f(uᵢ₋₁⁽ⁿ⁾)) , if f(uᵢ⁽ⁿ⁾) > 0
⎱ uᵢ⁽ⁿ⁾ - λ (f(uᵢ₊₁⁽ⁿ⁾) - f(uᵢ⁽ⁿ⁾)) , if f(uᵢ⁽ⁿ⁾) < 0
where λ = Δt / Δx is CFL number without speed
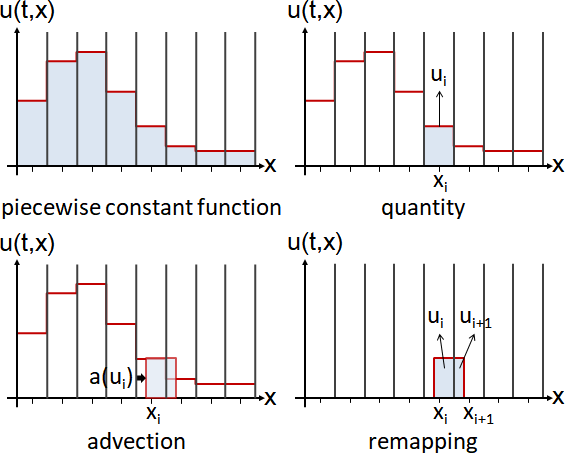
reconstruction:
(1) piecewise constant function
分段常數函數:單一格子的水面形狀是水平線。形成LED。
形成線性數值方案。根據Godunov's order barrier theorem,一階準度。
(2) piecewise linear function with slope limiter
分段一次函數:單一格子的水面形狀是斜線。(不是一次內插)
斜率限制器:所有格子的水面形狀以slope limiter將強行調整成LED。
形成非線性數值方案。二階準度。
然而捨棄一致性也無所謂準度了。二階準度只是van Leer在那嘴砲。
補零中位數
median(x,y,0) = minmod(x,y)
= ½ (sgn(x) + sgn(y)) min(x,y)
中位數
median(x,y,z) = x + minmod(y-x, z-x)
van Leer's method
of linear conservation law:
fᵢ₊₁⸝₂⁽ⁿ⁾ = ⎰ a (uᵢ⁽ⁿ⁾ + ½ σᵢ⁽ⁿ⁾ (Δx - a Δt)) , if a > 0
⎱ a (uᵢ₊₁⁽ⁿ⁾ - ½ σᵢ₊₁⁽ⁿ⁾ (Δx + a Δt)) , if a < 0
for each volume:
set initial value
by initial condition.
for (t = beginning_time; t <= ending_time; t += Δt)
for each volume:
compute quantities at interfaces
by piecewise polynomial function.
for each interface:
compute flux at interface
by Riemann solver.
for each volume:
update the solution
by recurrence.
High Order Entropy Stable Discontinuous Galerkin Discretizations
https://www.nas.nasa.gov/pubs/ams/2024/08-13-24.html
High order positivity-preserving entropy stable discontinuous Galerkin discretizations
https://sites.google.com/view/jessechan/talks
一些古怪的名詞
數值方法系列。第二行是作者原創名稱。
Godunov's method with slope limiter
monotonic upstream-centered scheme for conservation laws (MUSCL)
van Leer
Godunov's method with slope limiter
reconstruct–evolve–average method (REA method)
LeVeque
finite volume method with shape function
discontinuous Galerkin method (DG method)
Cockburn
finite volume method with higher-order shape function
arbitrary high order using derivatives (ADER-DG method)
Toro
numerical scheme with higher-order accuracy
high-resolution scheme
Harten
The set of TVD schemes contains the set of monotone schemes.
However, unlike the case of monotone schemes,
the fact that a scheme is TVD does not automatically imply that
it is consistent with the entropy inequality.
[Harten 1984]
order-preserving scheme (monotone scheme):
uᵢ⁽ⁿ⁺¹⁾ = Fᵢ(uⱼ₁⁽ⁿ⁾, ... , uⱼₘ⁽ⁿ⁾)
where Fᵢ is increasing function:
uⱼₖ⁽ⁿ⁾ ≤ vⱼₖ⁽ⁿ⁾ => uᵢ⁽ⁿ⁺¹⁾ ≤ vᵢ⁽ⁿ⁺¹⁾ for all 1 ≤ k ≤ m
order preservation:
u⁽ⁿ⁾ ≤ v⁽ⁿ⁾ => u⁽ⁿ⁺¹⁾ ≤ v⁽ⁿ⁺¹⁾
順帶一提,原始論文直接假設數值方案滿足穩定性,於是沒有輔以遞減(CFL條件)。
for conservative scheme with stability,
monotone scheme
=> weak formulation of entropy inequality
with Kružkov's entropy pair
=> L¹-contractive stability
[Harten–Hyman–Lax 1976]
for conservative scheme,
3-point monotone scheme <=> its flux function f̌(u,v)
is non-decreasing in u
and non-increasing in v
[Harten–Hyman–Lax 1976]
3-point conservative monotone scheme:
uᵢ⁽ⁿ⁺¹⁾ = uᵢ⁽ⁿ⁾ - λ (f̌(uᵢ⁽ⁿ⁾, uᵢ₊₁⁽ⁿ⁾) - f̌(uᵢ₋₁⁽ⁿ⁾, uᵢ⁽ⁿ⁾))
where ⎰ d/du f̌(u,v) ≥ 0 (f̌(u,v) is non-decreasing in u)
⎱ d/dv f̌(u,v) ≤ 0 (f̌(u,v) is non-increasing in v)
此時,單調方案=Godunov方案。證明省略。
for conservative scheme with CFL condition,
3-point monotone scheme <=> 3-point E scheme
(⟹)
https://math.tifrbng.res.in/~praveen/slides/gian2017_estable.pdf
since f̌(u,v) is non-decreasing in u and non-increasing in v
⎰ f̌(u,v) ≤ f̌(u,w) ≤ f̌(w,w) = f(w) if u ≤ w ≤ v
⎱ f̌(u,v) ≤ f̌(w,v) ≤ f̌(w,w) = f(w) if u ≤ w ≤ v
sign(v - u)(f̌(u,v) - f(w)) ≤ 0 for all w ∈ [u,v]
(⟹)
https://people.math.ethz.ch/~hiptmair/tmp/NUMHYP_07.pdf
since f̌(v,w) is non-decreasing in v and non-increasing in w
⎰ f̌(v,w) - f̌(u,u) ≤ 0 if v < u < w
⎱ f̌(v,w) - f̌(u,u) ≥ 0 if w < u < v
(⟸) [Abdi–Hansen–Schroll 2020]
An adaptive viscosity E-scheme for balance laws
http://www.math.ualberta.ca/ijnam/Volume-17-2020/No-3-20/2020-03-08.pdf
https://link.springer.com/chapter/10.1007/978-3-319-96415-7_33
先前介紹的數值方案,其中一些是熵滿足方案。
Lax–Friedrichs method is monotone scheme when CFL ≤ 1.
Lax–Wendroff scheme is NOT monotone scheme.
[Tadmor 1984]
Godunov's method is E scheme when CFL ≤ 1.
MUSCL is E scheme when CFL ≤ 1.
[Osher 1985]
[exterior algebra perspective]
mapping:
(1) function F
input (p, q) is a 2-form.
output (p̕, q̕) is a 2-form.
x = (p, q)
x̕ = (p̕, q̕)
x̕ = F(x)
area preservation:
(1) wedge product
p Λ q = p̕ Λ q̕
[Cheng–Knorr 1976]
The integration of the Vlasov equation in configuration space
https://www.osti.gov/servlets/purl/4200114
(6) and (7)
dv/dt = -E(x)
dx/dt = v
f⁽⃰⁾(x,v) = f⁽ⁿ⁾(x-vΔt/2, v)
f⁽⃰⃰⁾(x,v) = f⁽⃰⁾(x, v+E(x)Δt)
f⁽ⁿ⁺¹⁾(x,v) = f⁽⃰⃰⁾(x-vΔt/2, v)
[Charney–Eliassen 1949]
A Numerical Method for Predicting the Perturbations of
the Middle Latitude Westerlies
(7)(8)相差一個負號,與眾不同。導致旋度公式不成立。
[Charney–Fjørtoft–von Neumann 1950]
Numerical Integration of the Barotropic Vorticity Equation
(I3)上方提到Laplacian和Jacobian。
Jacobian定義成交叉微分項,與眾不同。其實是Jacobian determinant。
[Arakawa 1966]
Computational design for long-term numerical integration of
the equations of fluid motion: Two-dimensional incompressible
flow. Part I
(2)(3)(13)沿襲前人的定義。
[Arakawa–Lamb 1980]
A Potential Enstrophy and Energy Conserving Scheme for the
Shallow Water Equations
微分方程式取名為potential vorticity advection equation。
shallow water equations:
⎧ ∂h/∂t + ∂(hu)/∂x + ∂(hv)/∂y = 0 conservation of mass
⎨ ∂u/∂t + u ∂u/∂x + v ∂u/∂y + g ∂h/∂x = 0 advection of velocity
⎩ ∂v/∂t + u ∂v/∂x + v ∂v/∂y + g ∂h/∂y = 0 advection of velocity
shallow water equations (Poisson bracket formulation):
∂f/∂t + {f,H}(h,u) = 0
H ≔ ½hu² + ½hv² + ½gh² energy
f ≔ F(h,u,v) height and velocity
p ≔ h height
q ≔ u x velocity
懸案:守恆律可以強行轉換成辛動態系統,然後套用辛法。
equations of symplectic dynamical system (in physics)
針對物理學,辛動態系統的關係式。
(1) Hamilton's equations of motion
(2) Euler–Lagrange equation
Hamilton's equations of motion
Hamilton's equations of motion:物理量f(p,q)對時間全微分。而且該物理量恰好滿足Hamilton's equations。
Hamilton's equations of motion:
df/dt = ∂f/∂t + {f,H}(p,q)
canonical transformation (in physics):正則變換(物理學)。一種特殊的座標變換,新動態系統恰好又形成新辛動態系統。
canonical coordinates (in physics):正則座標(物理學)。新數對(p̂(t),q̂(t))。
original coordinates:
(p,q) skip (t)
canonical transformation (in physics):
C , when F and F̂ are symplectic dynamical systems
canonical coordinates (in physics):
(p̂,q̂) , when F and F̂ are symplectic dynamical systems
translation ⊄ coordinate transformation (in mathematics)
translation ⊂ coordinate transformation (in physics)
also symplectic transformation and canonical transformation.
preservation of Poisson bracket:帕松括號保留性。任意兩個函數,帕松括號保持相等。
H(t,p,q) + ∂/∂t S(t,q) = Ĥ(t,p̂,q̂)
where S(t,q) = F(t,p̂,q) with choosing proper p̂
劃個重點。
separable Hamiltonian H
preservation of symplecticity H + ∂F/∂t = Ĥ
Hamilton–Jacobi equation H + ∂S/∂t = 0
generating function F
action S , F with choosing proper p̂
Hamilton's principal function S , such that H + ∂S/∂t = 0














.jpg)








{kind=link}
{kind=link}
{kind=link}