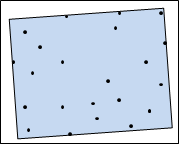
minimum enclosing circle
二維平面的圓,包圍所有點,面積暨周長暨半徑最小。
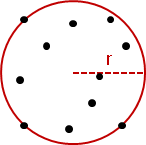
一個圓包圍所有點,半徑相對伸縮後,一個點歸屬所有圓。
【待補圖片】
最佳化。coordinate descent改良版。O(Nlog²R)。
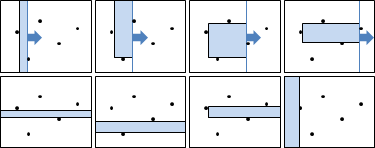
固定參數,問題簡化為圓心X座標未知、Y座標已知。觀察每種X座標的半徑,恰是單峰函數(谷形)。Y座標微調,仍是單峰函數。未知已知對調,仍是單峰函數。兩者皆未知,形成二維單峰函數。兩層trisection method,X座標逐步走到最低處,Y座標總是走到最低處。求X座標O(logR)回合,求Y座標O(logR)回合,每回合枚舉所有點以求得半徑。總時間複雜度O(Nlog²R)。
圓心位於farthest point Voronoi diagram頂點。O(NlogN)。
randomized incremental method。平均O(N),最差O(N²)。
以遞增法求最小包圍圓,逐次添加一點,並且調整最小包圍圓。若新點在圓內,不做任何事;若新點在圓外,則新點一定在新圓上,但是本來的點就不一定在新圓上了。於是得到新問題:已知一點在圓上,求最小包圍圓。接著又得到新問題:已知兩點在圓上,求最小包圍圓。已知兩點時,以枚舉法掃描所有點,找到最遠的點。
添加一點的時間複雜度分成兩種情況:圓不變、圓變動。因為無法預測變動,所以窮舉各種結果、反推變動機率。各種結果是新圓上有兩點、有三點。現有i點、已知一點在圓上,因此新點導致新圓的機率是(2-1)/i、(3-1)/i。添加一點的平均時間複雜度是O(1),添加N點的平均時間複雜度是O(N)。原始問題以此類推,平均時間複雜度O(N)。
UVa 10005 11681
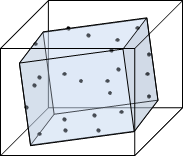
minimum enclosing ball / minimum bounding sphere
三維空間的球,包圍所有點,體積暨表面積暨半徑最小。
最佳化。coordinate descent改良版。O(Nlog³R)。
Welzl's algorithm。平均O(N)。
UVa 10095
minimum k enclosing circle
二維平面的圓,包圍k個點,面積暨周長暨半徑最小。
order k Voronoi diagram。O(NlogN + k²N)。
二元搜尋半徑r。窮舉每個點,作為圓邊界,顯然圓心與該點相距r。旋轉的掃描線,圓繞該點一圈。O(logR ⋅ N ⋅ NlogN)。
承上,只取鄰點來掃描,以該點為中心,取正方形邊長4r之內所有點,確保點數低於k(16r²)/(πr²) < 5.1k。range tree。O(logR ⋅ N ⋅ (klogk + log²N))。
ICPC 7488
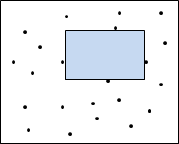
maximum empty circle / maximum inscribed circle
二維平面的圓,不含所有點和邊,面積暨周長暨半徑最大。
一群點最大空圓:圓心位於Voronoi diagram的頂點上。如果平面有邊界,那麼圓心也可能在邊上。O(NlogN)。
凸多邊形最大內切圓:每條邊同時往垂直方向等速內縮。每條邊配合左右鄰邊的角平分線,就可求得消失所需距離。換個觀點,不內縮了,改為預測最快消失的邊,刪除此邊,左右鄰邊延長銜接於一點,就縮小問題範疇了。所有邊放入二元樹,按照消失順序排序,每當刪除一條邊就更新二元樹。O(NlogN)。
凸多邊形最大內切圓:二元搜尋內切圓半徑,以半平面交集驗證。O(NlogR)。
UVa 11257 ICPC 3890
簡單多邊形最大內接圓。【待補文字】
正交多邊形最大內接圓。【待補文字】
ICPC 2994
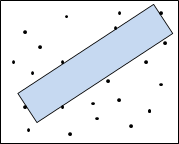
minimum enclosing annulus
二維平面的環,內圍外圍圓心相同,包圍所有點。可令寬度最小、令面積最小。
建立Voronoi diagram與farthest point Voronoi diagram,窮舉三種情況。O(N²)。
一外三內:窮舉外點;窮舉圓心,即Voronoi diagram的點。O(N²)。
兩外兩內:窮舉Voronoi diagram的邊,
窮舉farthest point Voronoi diagram的邊,
兩邊求交點,作為圓心。O(N²)。
三外一內:窮舉內點;窮舉圓心,即farthest point Voronoi diagram的點。O(N²)。
maximum empty annulus