half-plane
half-plane
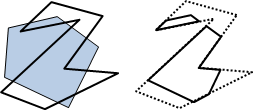
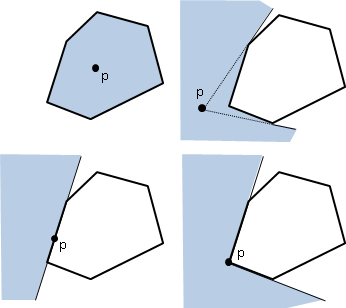
一條直線把二維平面劃分為兩半,其中一半就是「半平面」。半平面可以包含直線,也可以不包含直線。
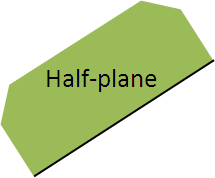
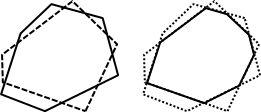
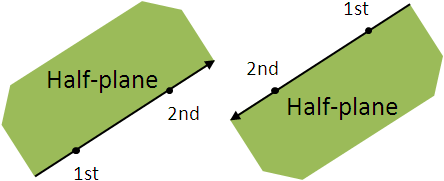
半平面的一些圖示方式:
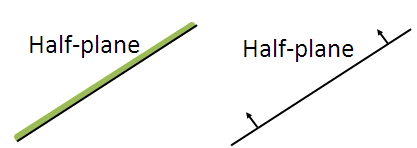
實作時,通常以兩個點來記錄半平面的直線、以兩個點的順序來記錄半平面的方向。
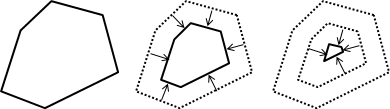
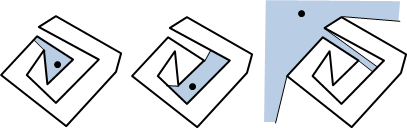
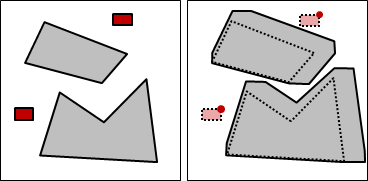
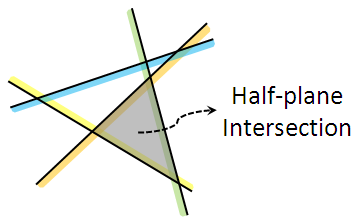
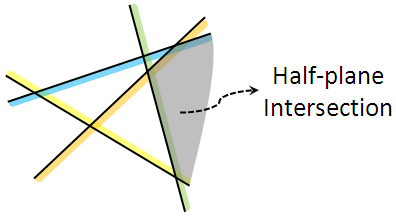
half-plane intersection
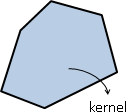
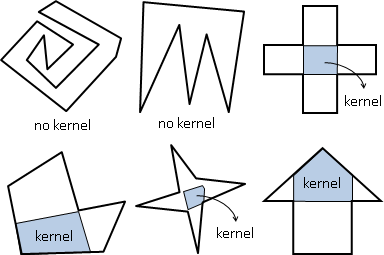
「半平面交集」就是許多個半平面的交集區域。半平面交集的結果可能是:一個開放區域、一個凸多邊形、一條線、一條線段、一個點、空集合。
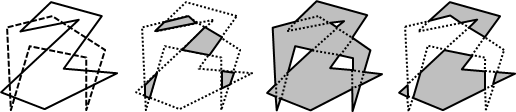
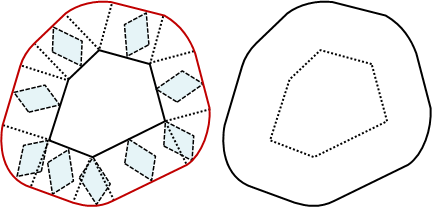
演算法(incremental method)
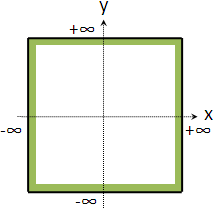
一、預先使用四個半平面,設定一個極大的正方形邊界,讓半平面交集擁有邊界。 二、逐一加入每個半平面,求出當下的半平面交集(凸多邊形)。
online演算法,隨時維護一個半平面交集。每次更新需時O(N),總時間複雜度O(N²),N是半平面數目。
UVa 10084 10117 11265
演算法(randomized incremental method)
預先排序、預先隨機排列,最差、平均時間複雜度O(NlogN)。過程如同「convex hull: incremental method」,求切點改為求交點。
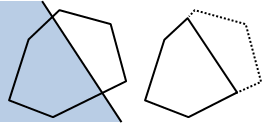
演算法(divide-and-conquer method)
時間複雜度O(NlogN),N是半平面數目。
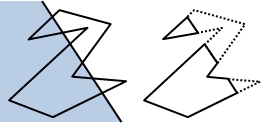
divide:把半平面分成兩堆。 conquer:分別遞迴求解。 combine:求兩個凸多邊形的交集。O(N)
兩個凸多邊形的交集,可以用旋轉卡尺求解,也可以用掃描線求解。
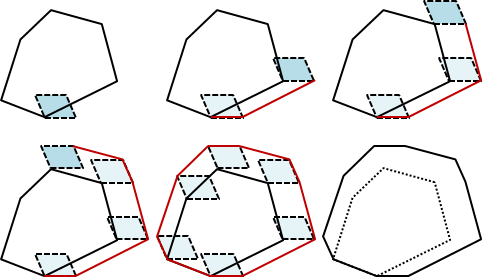
演算法【尚無正式名稱】
2006年由競賽選手南京外国语学校朱泽园《半平面交的新算法及其实用价值》提出。我不清楚是否已有正式學術論文,也不確定演算法是否正確。
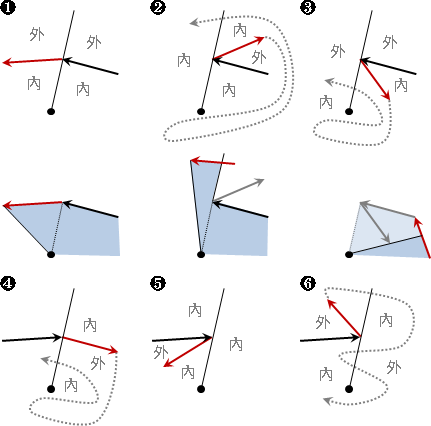
半平面交集是一個凸多邊形,凸多邊形的邊很有順序的沿著外圍繞行一圈,越來越傾斜。援引Graham's scan的精神,所有半平面,預先按照角度(不是斜率)排序,逐步找出凸多邊形的邊。
一、所有半平面,按照角度排序。O(NlogN) 角度相同的半平面只需留下最內側的一個。 二、建立一個deque,加入前面兩個半平面。O(1) 三、從第三個半平面開始,依序將半平面加入deque。O(N) 甲、deque右端持續彈出,直到deque右端的兩個半平面的交點,位於此半平面內。 乙、deque左端持續彈出,直到deque左端的兩個半平面的交點,位於此半平面內。 丙、deque右端加入此半平面。 四、刪除deque兩端多餘的半平面。O(N) 甲、deque右端持續彈出,直到deque右端的兩個半平面的交點,位於deque左端的半平面內。
時間複雜度O(NlogN),主要取決於排序的時間。N是半平面數目。
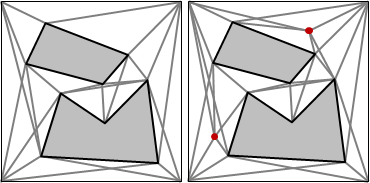
有點類似簡單多邊形的凸包演算法Melkman's algorithm,但是兩者並非點線對偶。