“fake” segment tree【尚無正式名稱】
此資料結構由競賽選手發明,沒有發表為正式的學術論文。目前發現最早出現於Baltic OI 2001: Mars Maps,官方解答提供了此資料結構的程式碼。
此資料結構最初沒有特定名稱。傳入中國之後,競賽選手將名稱定調為segment tree,創造大量相關題型,例如SPOJ: GSS3,令segment tree之名稱被發揚光大。然而「segment tree」是既有的資料結構名稱,所以此資料結構勢必另取他名,以免混淆。
建立資料結構
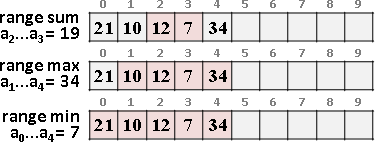
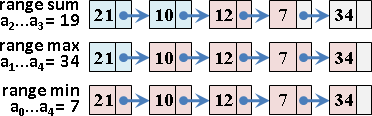
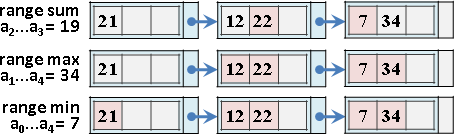
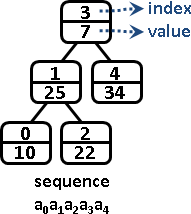
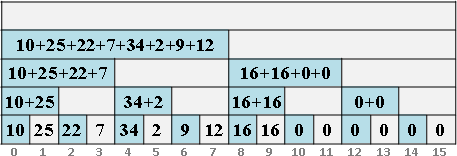
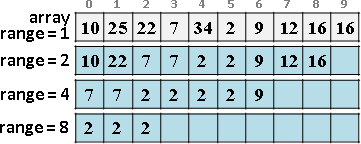
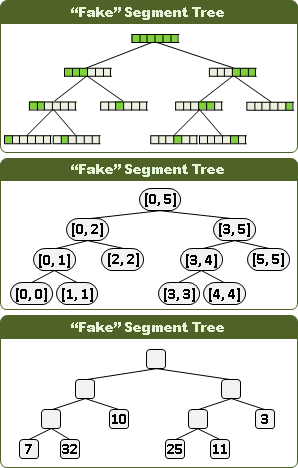
遞迴二分區間,樹葉存放數列,一個樹葉儲存一項;非樹葉存放擴充資訊,諸如區間總和、區間最大值、區間最小值。
二元樹的資料結構,採用陣列,投機取巧省去new和delete。
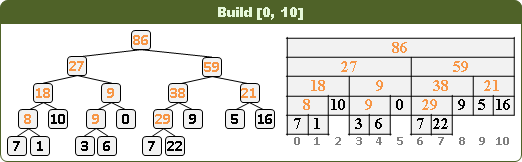
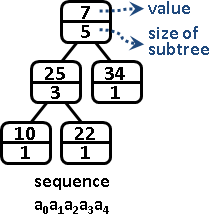
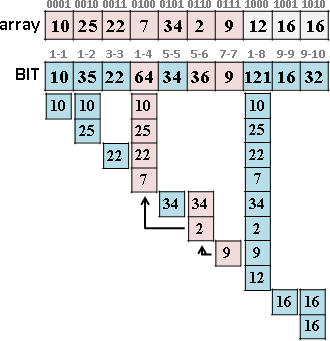
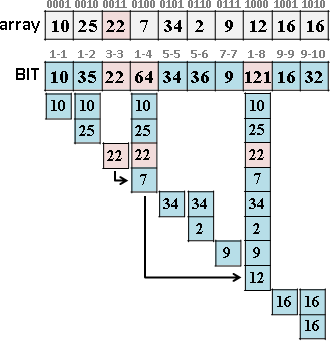
進一步重新配置節點位置,節省記憶體空間。節點[L,R]配置於陣列第L+R格。
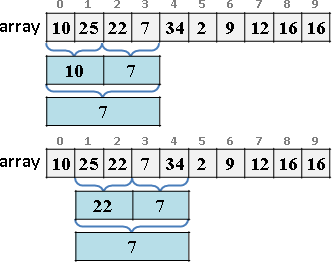
原理如同二元搜尋樹,左子樹L+R較小或相等、右子樹L+R較大,導致每個節點的L+R皆相異,例外是樹葉與非樹葉之間的L+R可能相等,此時樹葉配置於原本位置、非樹葉配置於下一格。
節點總共2N-1個,陣列總共2N-1格。空間複雜度O(N),時間複雜度O(N)。N是數列長度。
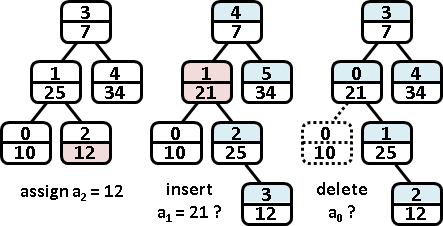
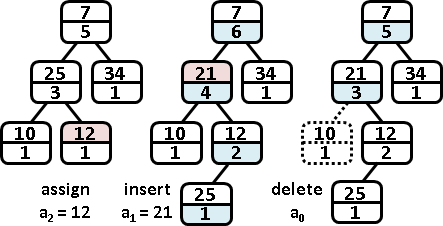
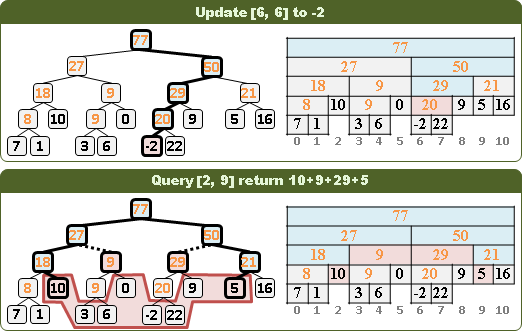
更新第k項、區間總和、區間最大值、區間最小值
類似二元搜尋樹,時間複雜度是樹的深度O(logN)。
UVa 11297 12299
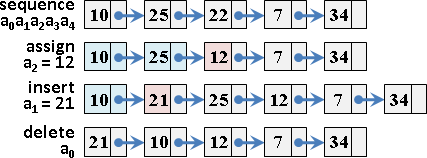
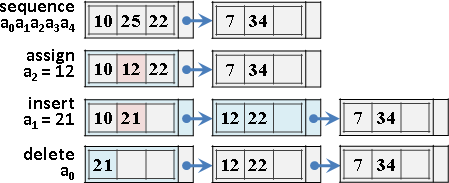
插入第k項、刪除第k項
不負責任地交給讀者。
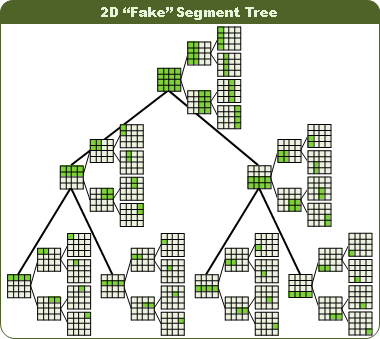
推廣到高維度
一維數列推廣到二維陣列、三維陣列。
二維偽線段樹,首先製作一棵第一維度的偽線段樹(X樹),然後每個節點各自接上一棵第二維度的偽線段樹(Y樹)。中文網路稱作「树套树」。
UVa 12698
更新區間:楔子
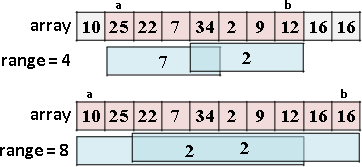
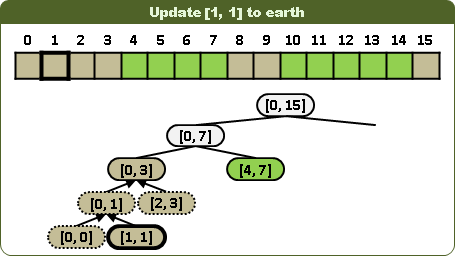
偽線段樹也可以更新區間。首先簡化問題,把數字改成顏色。如果區間不是相同顏色,就繼續遞迴對半分割下去。如果區間是相同顏色,暫且不分割!
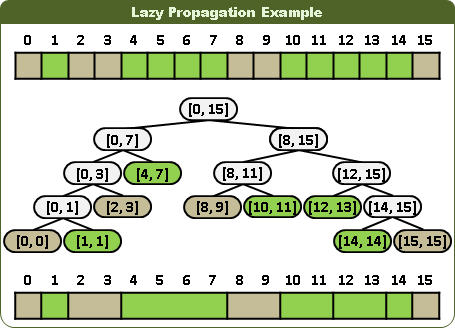
更新第k項,有三大步驟:一、搜尋之時,原有顏色分離,挪往下層。二、就位之時,直接覆蓋顏色,刪除子樹(或者無視子樹)。三、回溯之時,相同顏色合併,挪往上層。
此技巧尚無正式名稱,英文網路稱作「lazy propagation」,中文網路稱作「懒惰标记」,翻譯錯誤。
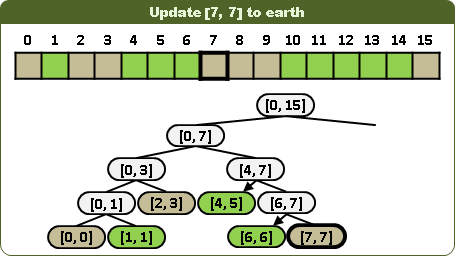

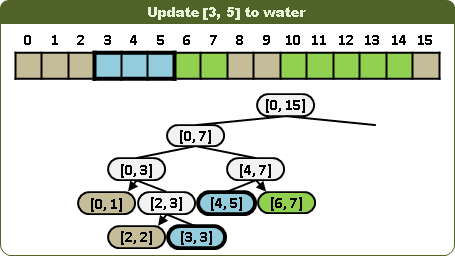
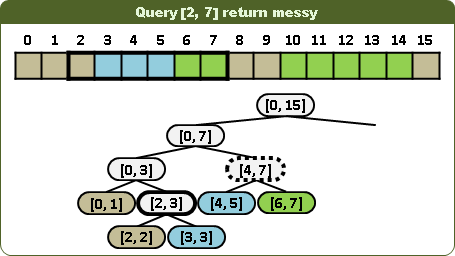
更新區間:視情況左右子樹都得走,並分割更新區間。
查詢第k項:一旦遭遇顏色,即得答案,不必深入子孫。
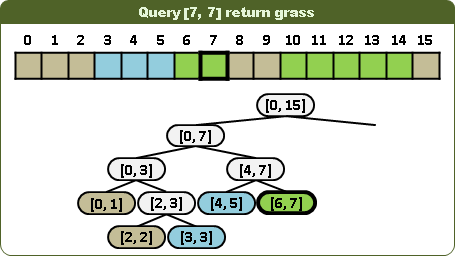
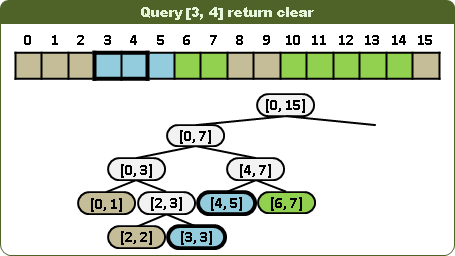
查詢區間顏色是否一致:視情況左右子樹都得走,並分割查詢區間。當節點區間大於等於查詢區間時,一旦遭遇顏色,即可判斷異同,不必深入子孫。當節點區間小於等於查詢區間時,一旦遭遇無色,即得答案為否,不必深入子孫。不能推廣到高維度。
這四項操作的時間複雜度都是O(logN)。
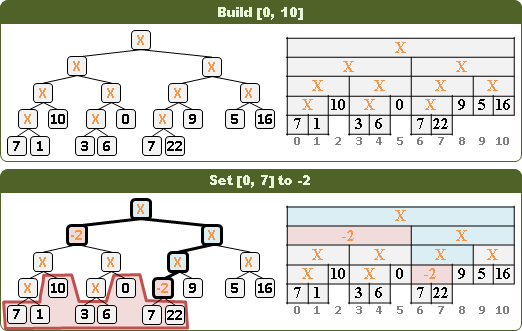
更新區間:統統改為相同數字
更新第k項、更新區間:運用「lazy propagation」技巧,凡遭遇已改值的區間,則分離挪往下層。
查詢第k項、查詢區間:凡遭遇已改值的區間,即得答案,不必深入子孫。
查詢區間不能推廣到高維度。
更新區間:統統增減相同數值
更新第k項、更新區間:直接在對應區間累計增減值。
查詢第k項:累加路線上的增減值。
似乎無法查詢區間。
這似乎也被歸類於「lazy propagation」技巧。
UVa 11402 11992