The content is directly taken from Prof. Tung-Wu Lu. I attribute it without permission, though. I try to hide that fact by rewriting the whole content. I am pretending that I never do anything evil. Keep your promise not to announce it, okay?
human motion
人體運動。你自己全身上下動一動吧。
human measurement(anthropometry)
人體測量。觀察人體外表。例如身高、體重、三圍、足長。
human body segments 人體肢段
head 頭 ┬ head and neck 頭頸
neck 頸 ┘
torso 胸 ┐
abdomen 腹 ┼ trunk 軀幹
pelvis 骨盆 ┘
upper arm 上臂 ┐
forearm 前臂 ┼ upper limb 上肢
hand 手 ┘
thigh 大腿 ┐
shank 小腿 ┼ lower limb 下肢
foot 足 ┘
human body joints 人體關節
shoulder 肩 ┐
elbow 肘 ┼ upper limb 上肢
wrist 腕 ┘
hip 髖 ┐
knee 膝 ┼ lower limb 下肢
ankle 踝 ┘
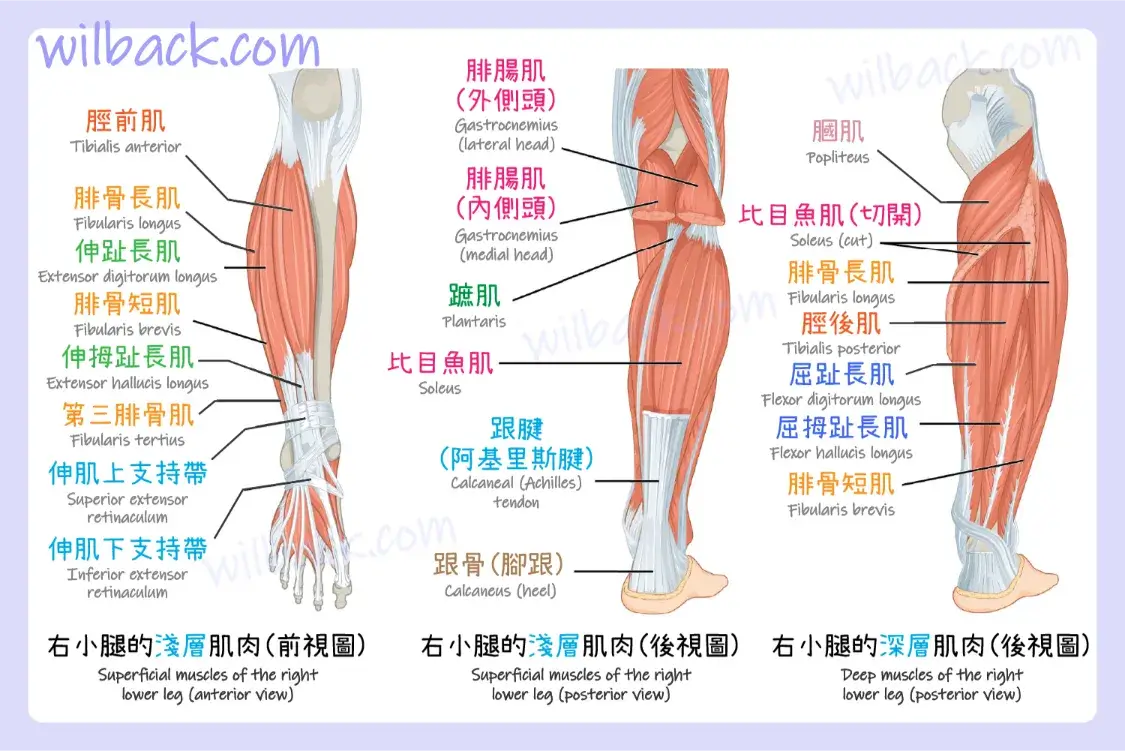
human dissection(anatomy)
人體解剖。觀察人體內裡。例如骨骼、關節、肌肉、神經。
解剖方位。方便描述人體所有東西的位置。
anatomical position
解剖學姿勢。全身直立站好,手心朝向正面。
(人體躺在解剖台的自然姿勢。)
S1_DP_04_M.c3d (1078KB)
投球與撿球。兩腳分別踩在兩臺測力板。
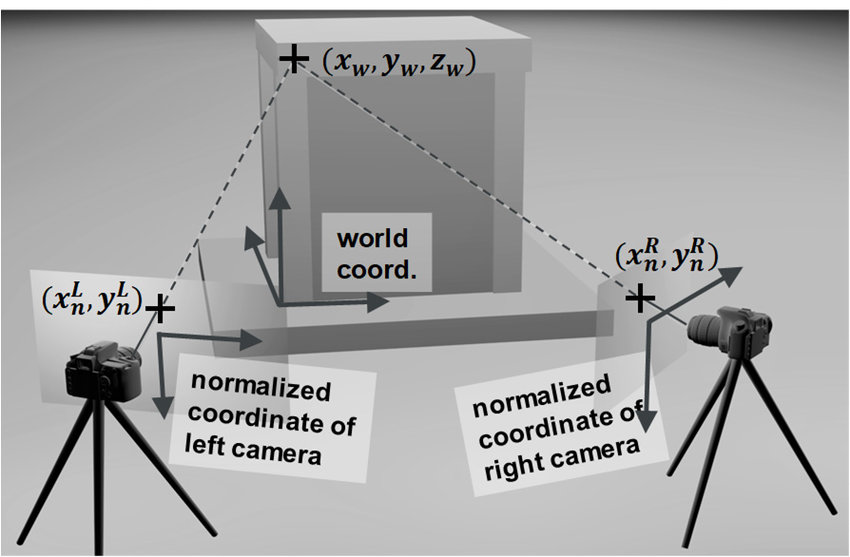
Three-dimensional motion capture data during repetitive
overarm throwing practice
https://www.nature.com/articles/sdata2018272
https://doi.org/10.6084/m9.figshare.c.4017808.v1
2014001_C1_01.c3d (773KB)
健康成人走過兩臺測力板。
A multimodal dataset of human gait at different walking
speeds established on injury-free adult participants
https://www.nature.com/articles/s41597-019-0124-4
https://doi.org/10.6084/m9.figshare.7734767.v8
tf01_0p6_01.c3d (4076KB)
膝上截肢者在跑步機上行走。
A kinematic and kinetic dataset of 18 above-knee amputees
walking at various speeds
https://www.nature.com/articles/s41597-020-0494-7
https://doi.org/10.6084/m9.figshare.c.4962305.v1
p10_trial8.c3d (3801KB)
健康人在跑步機上行走。
A biomechanics dataset of healthy human walking at various
speeds, step lengths and step widths
https://www.nature.com/articles/s41597-022-01817-1
https://doi.org/10.6084/m9.figshare.c.5897423.v1
ISB recommendation on definitions of joint coordinate system
of various joints for the reporting of human joint motion
--part I: ankle, hip, and spine [Wu et al. 2002]
https://pubmed.ncbi.nlm.nih.gov/11934426/
https://media.isbweb.org/images/documents/standards/isb_jcs_part_i.pdf
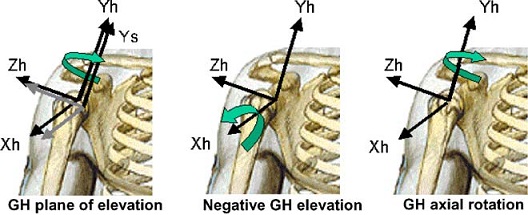
--part II: shoulder, elbow, wrist and hand [Wu et al. 2005]
https://pubmed.ncbi.nlm.nih.gov/15844264/
https://media.isbweb.org/images/documents/standards/isb_jcs_part_ii.pdf
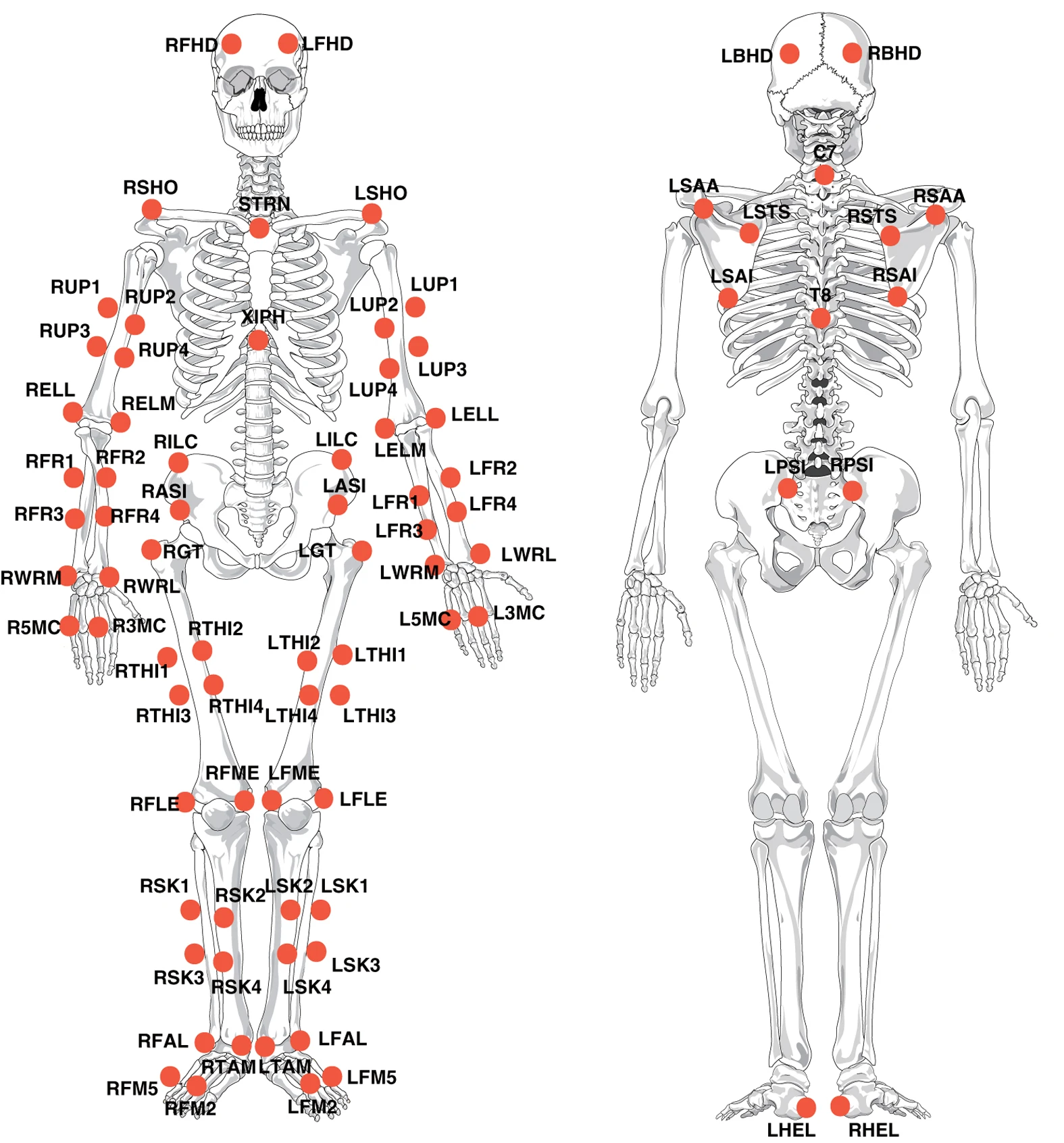
name | segment/joint | location
------------------------------------------------------
RFHD | Head | Apprx. over the Right Temple
RBHD | Head | Right Back Of The Head
STRN | Trunk | Suprasternal Notch
XIPH | Trunk | Xiphoid Process
C7 | Trunk | 7th Cervical Vertebra
T8 | Trunk | 8th Thoracic Vertebra
RASI | Pelvis | Right Ant Superior Iliac Crest
RPSI | Pelvis | Right Post Superior Iliac Crest
RILC | Pelvis | Right Iliac Crest
RSHO | Right Humerus | Acromion Process
RSTS | Right Humerus | Trigonum Scapulae
RSAI | Right Humerus | Angulus Inferior
RSAA | Right Humerus | Angulus Acromialis
RELL | Right Elbow | Lateral Epicondyle
RELM | Right Elbow | Medial Epicondyle
RWRL | Right Wrist | Lateral Point of Radial Styloid
RWRM | Right Wrist | Medial Point of Ulnar Styloid
R3MC | Right Hand | 3rd Metacarpal Head
R5MC | Right Hand | 5th Metacarpal Head
RGT | Right Femur | Femur Greater Trochanter
RFLE | Right Knee | Femur Lateral Epicondyle
RFME | Right Knee | Femur Medial Epicondyle
RFAL | Right Ankle | Fibula Lateral Malleolus
RTAM | Right Ankle | Tibia Medial Malleolus
RFM2 | Right Foot | 2nd Metatarsal Head
RFM5 | Right Foot | 5th Metatarsal Head
RHEL | Right Foot | Posterior of Calcaneus
註:省略了左半邊。省略了肢段標記群。
the man who lost his body是一部紀錄片,描述一位喪失本體感覺的患者如何面對疾病。19歲忽然發病,脖子以下無法如願移動。躺在床上十幾年。經過數年逐漸學會控制身體各個部位。又經過數年學會起身、下床、站起、走路。由於無法感知肌肉狀態,光是拿起蘋果就會導致重心不穩跌倒。做任何動作都必須隨時利用眼睛觀察姿勢,確保肌肉狀態正確。發病之後三十年,終於回到日常生活。
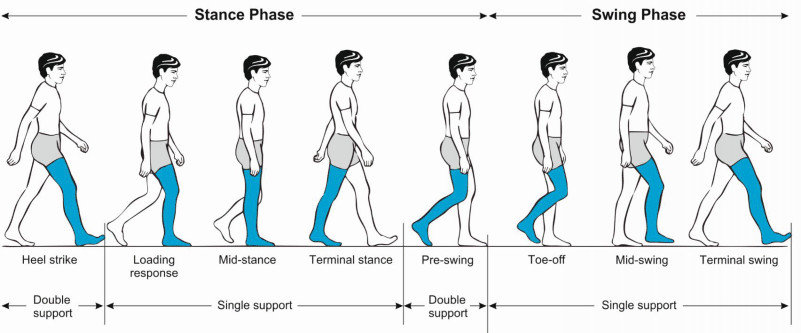
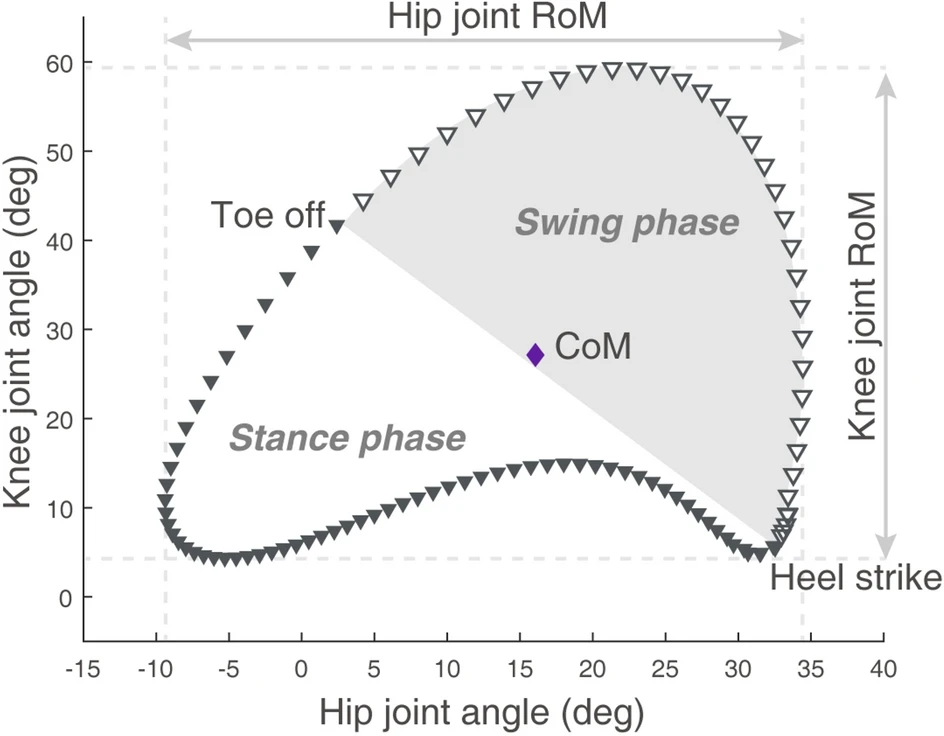
gait simulation
走路模型。
ballistic walking model
passive dynamic walking model
range of motion evaluation
https://www.dshs.wa.gov/sites/default/files/forms/pdf/13-585a.pdf
https://musculoskeletalkey.com/restoring-range-of-motion-and-improving-flexibility/
https://www.amazon.com/Range-Motion-Testing-Set-Charts/dp/0965342522
https://www.semanticscholar.org/paper/7e602a134667ff5f6f5dda8c7608a59f204d662c
https://www.realbodywork.com/joint-range-of-motion/
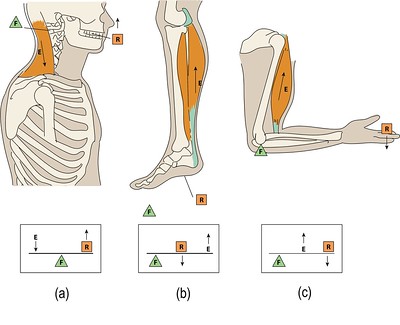
關節最多有六個自由度degree of freedom。三個平移維度、三個旋轉維度。
degree of freedom of human joint table
https://www.researchgate.net/figure/The-degrees-of-freedom-DoF-and-the-anatomical-segments-of-the-Rugby-Model-Body_fig1_312094367






.jpg)