observation, V
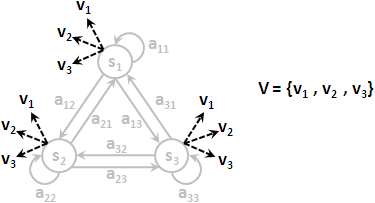
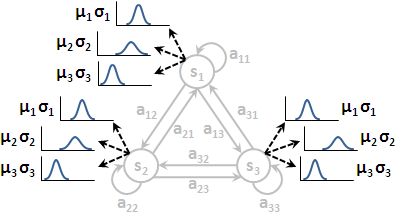
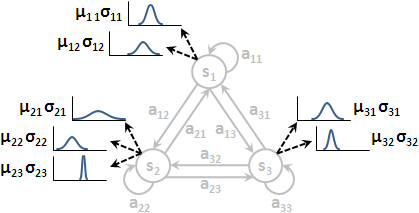
隱藏馬可夫模型添加了一個新要素:每當造訪一個狀態,就立刻從M個值當中,噴出其中一個值。每一個狀態都是噴出相同的M種值,這M個值通常標作v₁到vM。M是我們自行設定的常數。
全部觀察構成的集合,標作大寫V。
observation probability, B
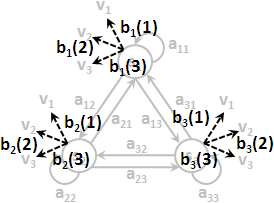
每一個狀態噴出這M種值的機率都不相同。
狀態sᵢ噴出vₖ的機率,通常標作bᵢ( k )或者簡單標作bᵢₖ。亦可標作條件機率P( vₖ | sᵢ ),意思是現在在狀態sᵢ、噴出觀察vₖ。亦可套用狀態序列與觀察序列,標作P( oₜ = k | qₜ = i )。
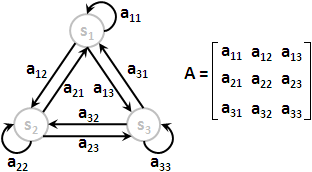
每個狀態各自的噴出機率構成的集合,標作B。通常把B看作N個函數,或者簡單地看作一個N×M矩陣。
observation sequence, o₁ o₂ ...... oT
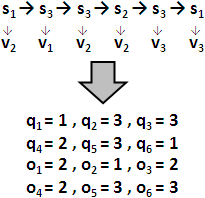
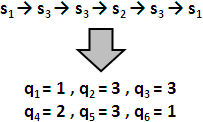
走T步後,一路上T個狀態個別噴出的值的編號。
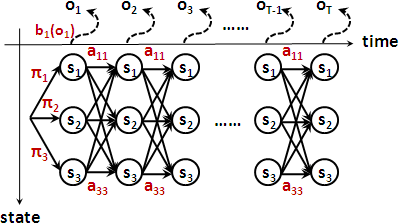
有了狀態序列與觀察序列,一條路徑的機率,可以寫成πq₁ × bq₁( o₁ ) × aq₁q₂ × bq₂( o₂ ) × ...... × aqT-1qT × bqT( oT ),也可以寫成P( sq₁ ) × P( vo₁ | sq₁ ) × P( sq₂ | sq₁ ) × P( vo₂ | sq₂ ) × ...... × P( sqT | sqT-1 ) × P( voT | sqT )。我想各位差不多眼花撩亂了。名可名也,非恒名也,若能領會原理就不用刻意背誦代數了。
hidden Markov model
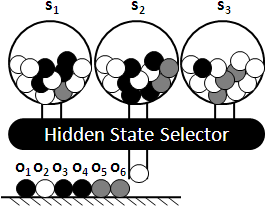
隱藏馬可夫模型的特色就是:我們只看到了觀察序列(果),但是我們看不到狀態序列(因);我們只看到了依序噴出的T個值,但是我們看不到一路走過的是哪T個狀態。
「隱藏」二字便是指行蹤被隱藏了,狀態序列被隱藏了。
接下來要討論隱藏馬可夫模型的三個基本問題,以及演算法。
1. evaluation problem: forward-backward algorithm
看到一個觀察序列o₁ o₂ ...... oT,但是看不到狀態序列s₁ s₂ ...... sT的情況下,找出所有可能的路徑的機率的總和。
對於一個觀察序列來說,狀態序列有各式各樣的可能性,一共有Nᵀ種可能性。
運用窮舉法,時間複雜度O(NᵀT)。運用「動態規劃」,時間複雜度降低為O(N²T)。
原理是結合律,比如x×b×c + y×b×c + z×b×c = (x+y+z)×b×c,能加的先加一加。左端結合是forward,右端結合是backward;使用其中一種即可,計算結果都一樣。
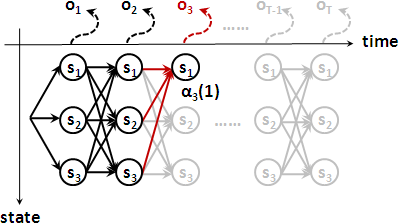
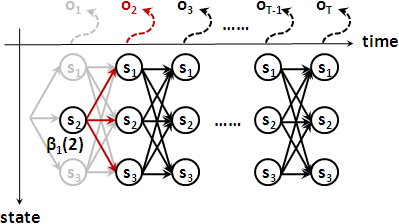
forward:
α₁(j) = πⱼ × bⱼ(o₁)
αt+1(j) = ∑i=1⋯N[ αₜ(i) × aᵢⱼ ] × bⱼ(ot+1)
backward:
βT(i) = 1
βₜ(i) = ∑j=1⋯N[ aᵢⱼ × bⱼ(ot+1) × βt+1(j) ]
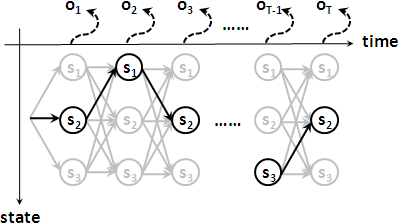
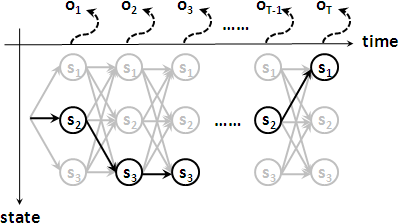
2. decoding problem: Viterbi algorithm
看到一個觀察序列o₁ o₂ ...... oT,但是看不到狀態序列s₁ s₂ ...... sT的情況下,從所有可能的路徑當中,找出機率最大的一條路徑,以及其機率。
這跟上一個問題如出一轍,運用「動態規劃」就可以解決。唯一的差別就是把∑換成max而已。
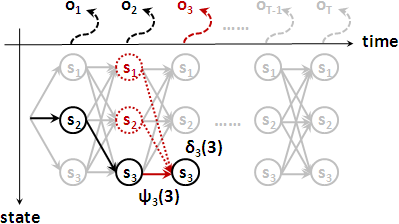
forward:
δ₁(j) = πⱼ × bⱼ(o₁)
δt+1(j) = maxi=1⋯N[ δₜ(i) × aᵢⱼ ] × bⱼ(ot+1)
path tracing:
ψₜ(j) = arg maxi=1⋯N[ δt-1(i) × aᵢⱼ ] × bⱼ(oₜ)
= arg maxi=1⋯N[ δt-1(i) × aᵢⱼ ]
3. training problem: EM algorithm
給定一個觀察序列o₁ o₂ ...... oT,更新ABΠ使得evaluation problem算得的機率盡量大。
更新的原理,採用了「maximum likelihood estimation」,以樣本平均數作為分布平均數,出現這些樣本的機率就是最大。
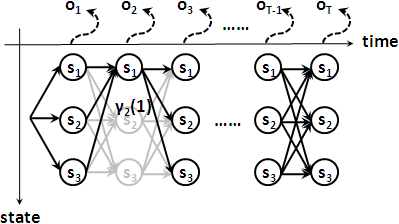
分子是穿越狀態sᵢ的所有路徑的機率的總和:
αₜ(i) × βₜ(i)
γₜ(i) = ————————————————————————— = ∑j=1⋯N ξₜ(i,j)
∑i=1⋯N [ αₜ(i) × βₜ(i) ]
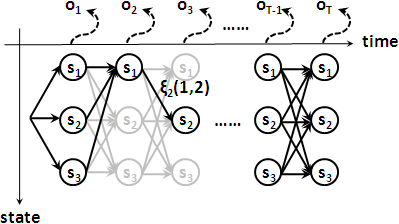
分子是穿越邊aᵢⱼ的所有路徑的機率的總和:
αₜ(i) × aᵢⱼ × bⱼ(ot+1) × βt+1(j)
ξₜ(i,j) = —————————————————————————————————————————————————
∑i=1⋯N ∑j=1⋯N [ αₜ(i) × aᵢⱼ × bⱼ(ot+1) × βt+1(j) ]
更新:
πᵢ = γ₁(i)
aᵢⱼ = ∑t=1⋯T-1 [ ξₜ(i,j) ] ÷ ∑t=1⋯T-1 [ γₜ(i) ]
bⱼ(k) = ∑t=1⋯T, oₜ=k [ γₜ(i) ] ÷ ∑t=1⋯T [ γₜ(i) ]
延伸閱讀:取log
寫程式時,機率都是小於一的數字,連乘之後數字越來越小。然而,計算機的浮點數,精確度是有極限的,當T很大時,連乘之後那就變成零了。所以實作時我們會取log,連乘也就變成了連加,避免連乘之後變成零的窘境。
舉例來說,一條路徑的機率,取log之後,可以寫成:log( πq₁ × aq₁q₂ × bq₁( o₁ ) × ...... ) = log( πq₁ ) + log( aq₁q₂ ) + log( bq₁( o₁ ) ) + ......。預先把ABΠ的每個數值取log即可。
取log之後,處理decoding problem沒有什麼大問題,比較麻煩的是evaluation problem與training problem,除了乘法運算還有加法運算。實數乘法化作了log加法,那麼實數加法怎麼辦呢?可以使用下列公式:
利用log(p)與log(q),求出log(p+q),一般讓底數等於10。b可以是任意數。
if p ≥ q
logb (p + q) = log p + logb (1 + blogb q - logb p)
else
logb (p + q) = log q + logb (1 + blogb p - logb q)
知名的隱藏馬可夫模型套件HTK是這麼實作的:
延伸閱讀:smoothing
training problem針對沒出現的觀察值,更新之後機率是零。往後,evaluation problem與decoding problem針對此觀察值,算得機率均是零。也就是說,一旦變成零,就無法恢復成非零了。
更新為零,可以改成更新為一個很小但是不等於零的數字,記得維持機率總和等於一。
只有離散版本HMM有此問題,稍後介紹的連續版本HMM就無此問題。
classification

兩組調性不同的資料集
data set 1 data set 2
1. ABBCABCAABC BBBCCBC
2. ABCABC CCBABB
3. ABCAABC AACCBBB
4. BBABCAB BBABBAC
5. BCAABCCAB CCAABAB
6. CACCABCA BBBCCBAA
7. CABCABCA ABBBBABA
8. CABCA CCCCC
9. CABCA BBAAA
每一個資料集各自建立一個HMM,實施training problem,訓練旗下所有資料。每筆資料輪流訓練一次,然後循環L次。
如果不是輪流訓練,而是連著訓練L次,那麼HMM熟記了後面幾個,反而淡忘了前面幾個。
如果每筆資料是不定期收到的、訓練好的HMM隨時要用於辨識,就無法輪流訓練。解決方式是記住之前的training problem表格,以比重求得這次training problem的平均數。
1 × γ₁(i) + n × γ₁(n)(i)
πᵢ(n+1) = ——————————————————————————
1 + n
1 × ∑t=1⋯T-1 [ ξₜ(i,j) ] + n × ∑t=1⋯T-1 [ ξₜ(n)(i,j) ]
aᵢⱼ(n+1) = ——————————————————————————————————————————————————————
1 × ∑t=1⋯T [ γₜ(i) ] + n × ∑t=1⋯T [ γₜ(n)(i) ]
1 × ∑t=1⋯T, oₜ=k [ γₜ(i) ] + n × ∑t=1⋯T, oₜ=k [ γₜ(n)(i) ]
bⱼ(n+1)(k) = ———————————————————————————————————————————————————————
1 × ∑t=1⋯T [ γₜ(i) ] + n × ∑t=1⋯T [ γₜ(n)(i) ]
pattern recognition
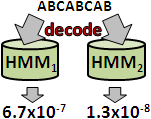
訓練好的HMM馬上可用於辨識。要辨識一筆資料,就窮舉每一個HMM,看看該筆資料最符合哪個HMM。所謂最符合,就是實施evaluation problem,取機率最大者,作為辨識結果。
為了加速,通常改用decoding problem。取log的情況下,evaluation problem要處理對數相加,而decoding problem不必,因此decoding problem效率略勝一籌。
經實驗觀察,採用evaluation problem與採用decoding problem的辨識結果幾乎相同。至于你信不信,我反正信了。
ICPC 6147