Voronoi diagram
Voronoi diagram
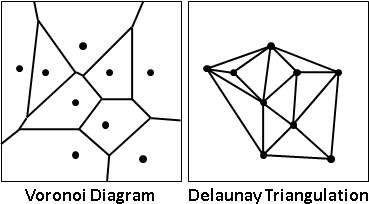
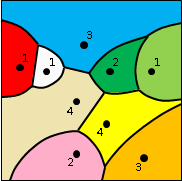
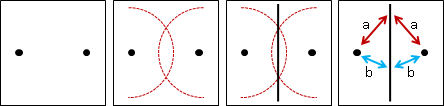
平面上散布許多點。平面上每一處,各自歸類於最近的點;自然而然的,形成了分界線,是中垂線。Voronoi diagram是分界線組成的集合。Voronoi是發明者的姓氏。
簡單來說,鄰近的點的中垂線,形成Voronoi diagram。
Voronoi diagram隱含著鄰近的資訊,所以「最靠近」、「距離最短」之類的問題,多半可以透過Voronoi diagram解決。
Voronoi diagram是大自然的圖案,諸如長頸鹿的斑紋、蜻蜓的翅膀、葉片的細胞壁。應用相當廣泛。


UVa 12109
perpendicular bisector
「中垂線」,中學數學,不再贅述。
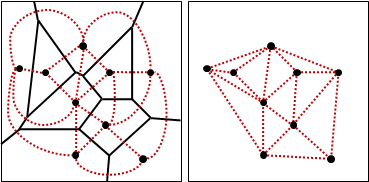
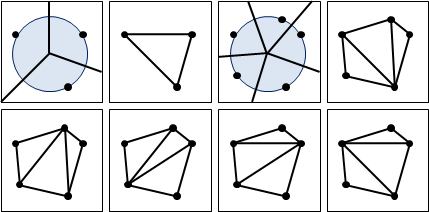
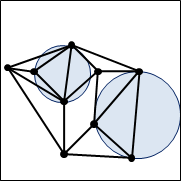
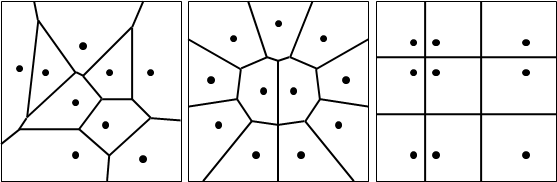
三角形的三中垂線,交於一點,是外接圓圓心,稱作外心。中垂線有等距、平分的感覺,圓有等距、歸心的感覺,兩者關係匪淺。
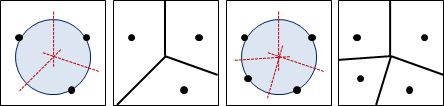
由此可知,Voronoi diagram一個點至少連著三條邊。
Voronoi diagram點和邊的數量
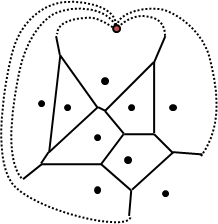
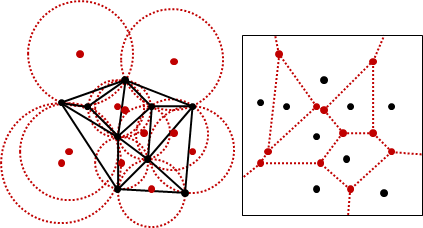
延伸至無限遠的邊,通通接往一個點,Voronoi diagram就變成平面圖。
運用平面圖歐拉公式v-e+f=2,輔以「一個點至少連著三條邊」的限制,可以推理出Voronoi diagram最多有2N-5個點、3N-6條邊,都是O(N)。
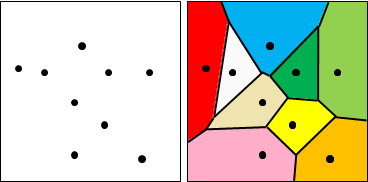
演算法(half-plane intersection)
枚舉每一點,求得該點的區域:與其他點形成的N-1條中垂線,求半平面交集。時間複雜度O(N ⋅ NlogN) = O(N²logN)。
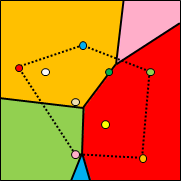
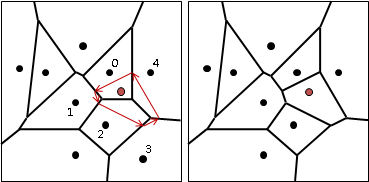
演算法(incremental method)
online演算法,一次加一點。找到當前輸入點相距最近的點,然後以中垂線繞行一圈求得當前輸入點的區域。時間複雜度O(N²)。
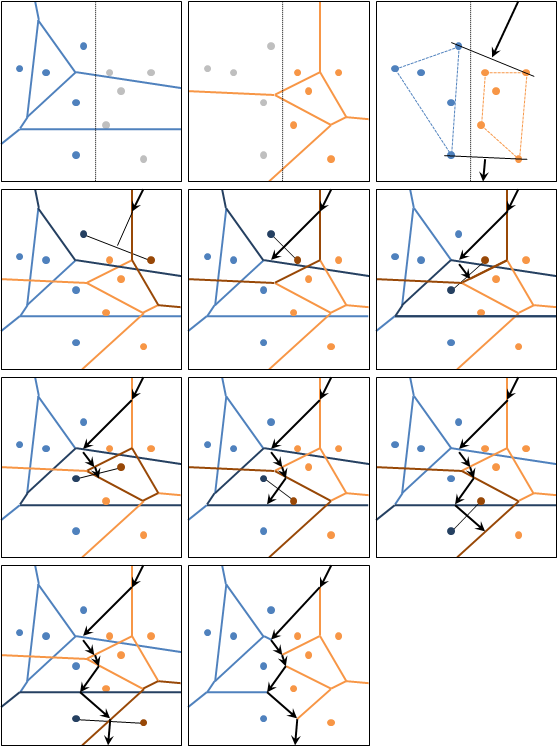
演算法(divide-and-conquer method)
所有點分成左右兩側,分別求出Voronoi diagram,然後合而為一。
從左右convex hull的外公切線的中垂線開始行進,一旦撞到左右Voronoi diagram,就改變行進方向。途中清除多餘的Voronoi diagram。
時間複雜度O(NlogN)。然而步驟繁雜,運行極慢,不實用。讀者只需知道Voronoi diagram存在這麼一個解題策略就行了,不需浪費時間鑽研細節。
演算法(Fortune's algorithm)
平移的掃描線。時間複雜度O(NlogN)。
實務上最快的演算法。