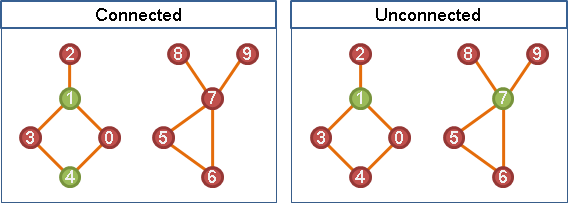
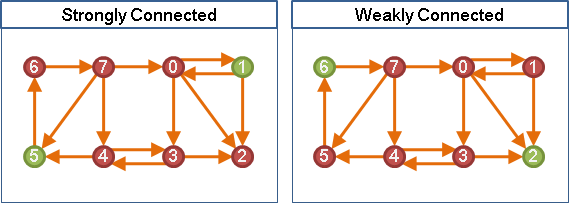
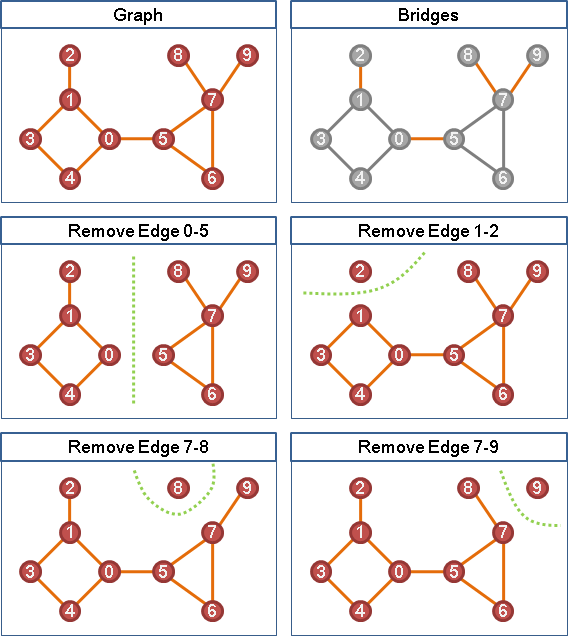
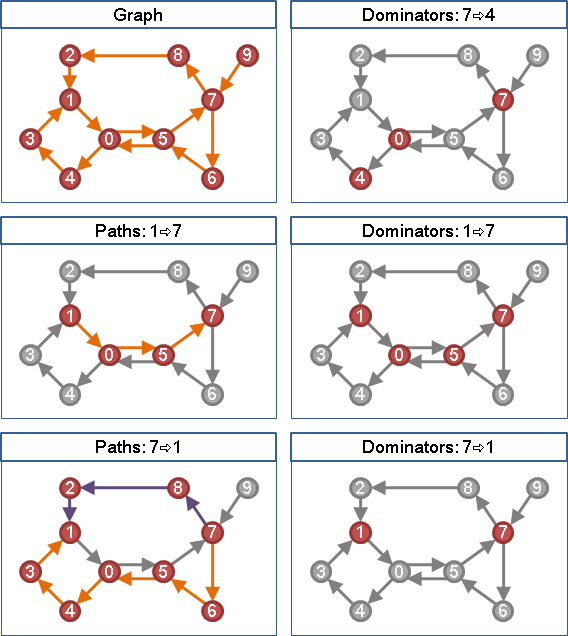
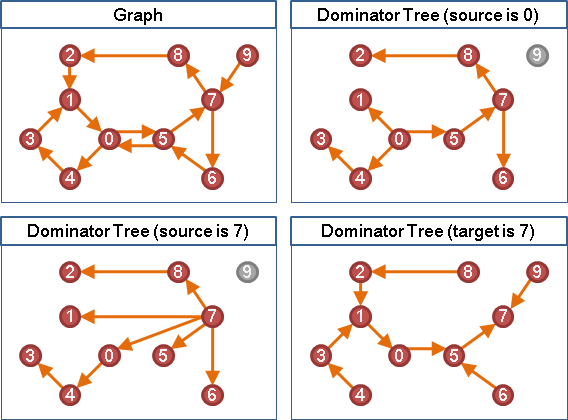
有向圖,給定起點,尋找所有的dominator
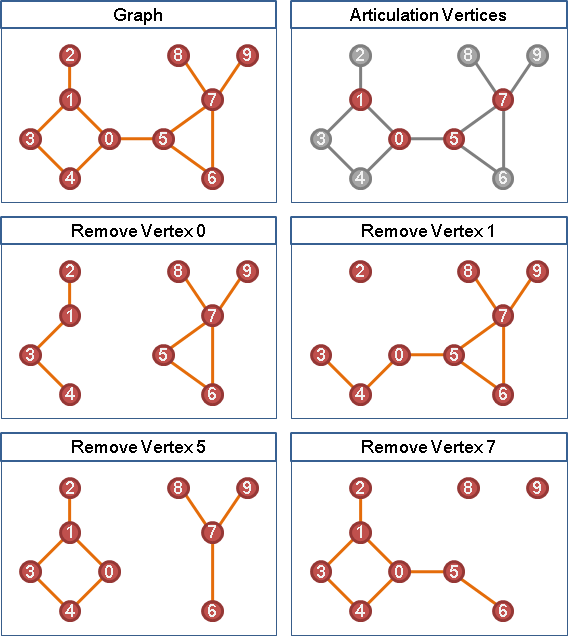
起點實施graph traversal。移除圖上一個點,再重新實施一次graph traversal。原先走得到、現在卻走不到的點,視作終點。移除的點,視作支配點。
輪流移除圖上每一個點,就能得到一種起點、每種終點的所有支配點。
這個演算法簡單易懂、容易實作,但是很花時間。
接下來介紹複雜難懂、不易實作,但是更快的演算法。
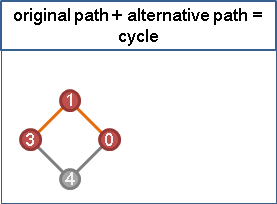
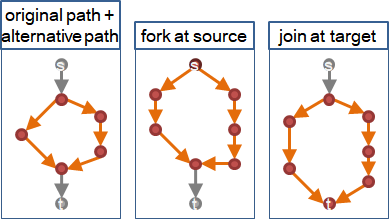
原本路線+替代路線
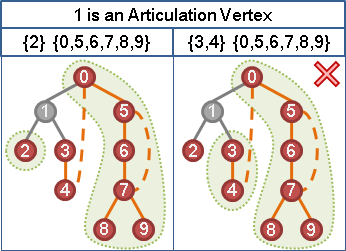
如果有替代路線,那麼「分岔點」到「會合點」之間的點,一定不是支配點!
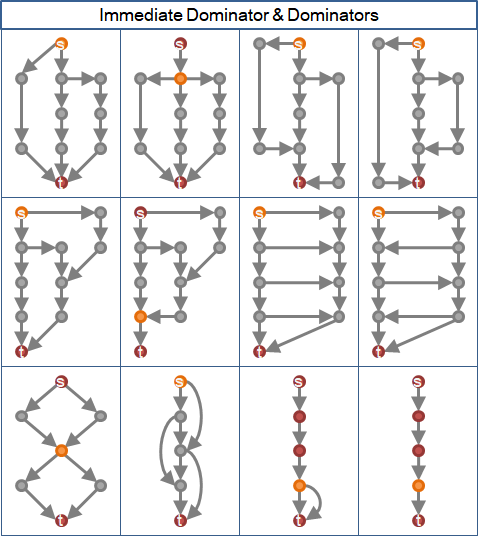
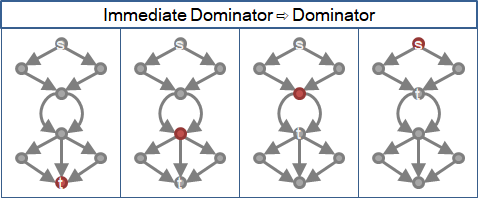
次低支配點【原始論文稱作immediate dominator】
給定起點與終點,支配點可能有許多個。方便起見,起點與終點計入支配點。離終點次近的支配點,稱作「次低支配點」。
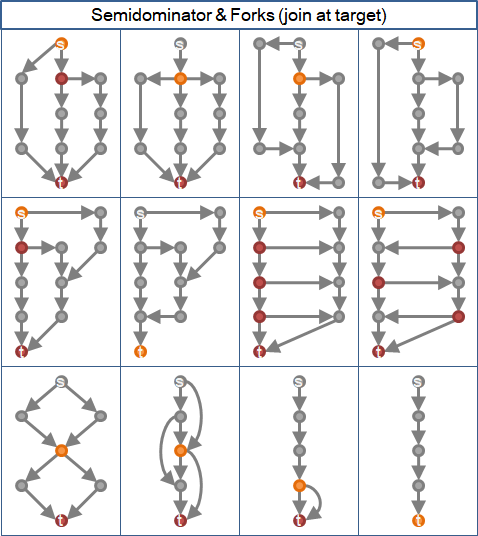
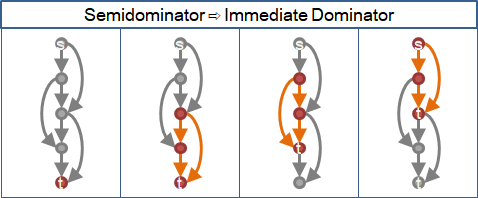
最高分岔點【原始論文稱作semidominator】
給定起點與終點,分岔點可能有許多個。方便起見,終點計入分岔點。離起點最近的分岔點,稱作「最高分岔點」。
此處的最高分岔點,強制規定會合點是終點,方便使用遞歸法。
一、遞迴尋找次低支配點,得到所有支配點。
支配點的支配點,也是支配點。
次低支配點,作為新終點,再度尋找次低支配點。不斷遞迴,得到所有支配點。
二、遞迴尋找最高分岔點,得到次低支配點。
最高分岔點、次低支配點,不見得相同。尤其是麻花辮。
從最高分岔點到終點,途中的每個點,作為新終點,尋找最高分岔點。如果沒有變得更高,就不會形成麻花辮,次低支配點即是原本的最高分岔點。如果變得更高,就不斷遞迴,逼近次低支配點。
但是有一個例外:抵達終點的路線只有唯一一條,最高分岔點是終點,次低支配點是終點的父親。為了應付這個例外,最高分岔點必須強制改成終點的父親。
三、尋找後半段森林,得到最高分岔點。
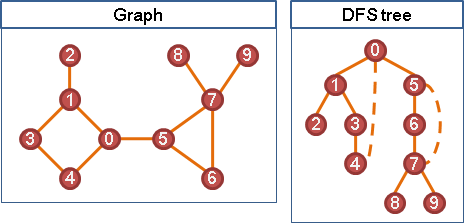
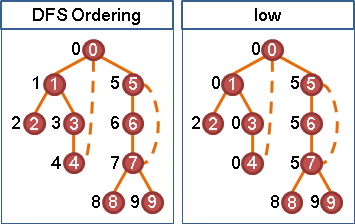
把圖重新繪製成樹的模樣,就容易觀察替代路線了。這裡利用一下DFS tree吧!
根據DFS tree的性質,針對一個分岔點,原本路線只會經過樹上的邊,替代路線只會經過時刻更大的點。
原本路線與所有替代路線,時刻最小的點,就是該分岔點。
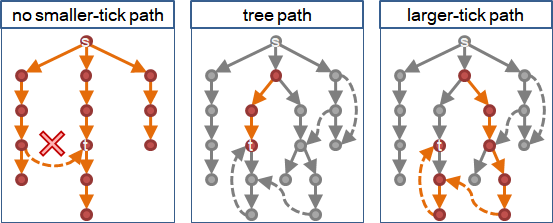
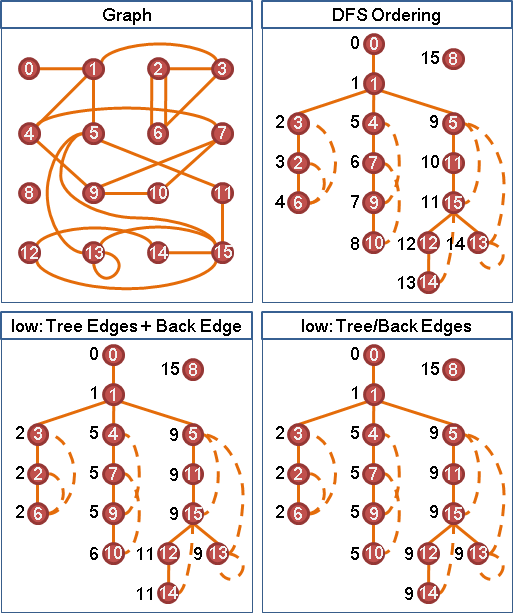
以分岔點為界,DFS tree後半段構成的森林(以及入邊),涵蓋了原本路線與所有替代路線。
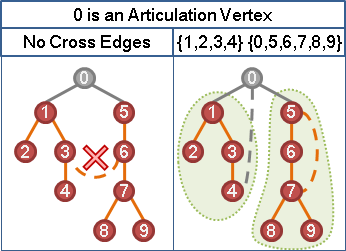
以終點為界,DFS tree後半段構成的森林(以及入邊),涵蓋了所有替代路線。
針對一個終點,在森林(以及入邊)當中,抵達終點的所有路線,時刻最小的點,就是終點的最高分岔點。

有向圖,給定起點,尋找每種終點的最高分岔點
計算順序定為「時刻從大到小」,讓後半段森林逐步成長。
時刻從大到小,依序作為終點,計算最高分岔點sdom[]。
針對一個終點,窮舉所有入邊,在後半段森林,找到最高分岔點sdom。
針對一條入邊,只需沿著tree edge逆行到森林頂端。這一條路線上的sdom,涵蓋了各種替代路線的最高分岔點。
窮舉所有入邊,也包括了父親,恰好能夠應付先前那個例外。
時間複雜度O(VE)。
奇技淫巧:disjoint-sets forest
後半段森林採用disjoint-sets forest。找到路線上的sdom時刻最小值之後,順手將路線上每一個點直接連向源頭,減少森林高度。恰巧不影響路線上sdom時刻最小值。
維護森林,本來是事後讓i點與小孩聯集,改成了事前讓i點與父親聯集!i點的sdom時刻最終將小於等於父親,而父親的sdom預設為自身,恰巧不影響sdom時刻最小值。
時間複雜度等同graph traversal的時間。圖的資料結構為adjacency matrix是O(V²);圖的資料結構為adjacency lists是O(V+E)。
有向圖,給定起點,尋找每種終點的次低支配點(支配樹)
(Georgiadis–Tarjan–Werneck algorithm)
時刻從小到大,遞迴尋找最高支配點,逼近次低支配點。
時間複雜度O(V²)。
有向圖,給定起點,尋找每種終點的次低支配點(支配樹)
(Lengauer–Tarjan algorithm)
利用森林計算idom最小值。
時間複雜度等同graph traversal。但是速度比方才更慢。
原始論文宣稱O(ElogV),畢竟那個時候還沒有均攤分析。
奇技淫巧:編號改成時刻
讓程式碼再縮短一點點!
sdom[]、idom[]、best[],編號改成時刻。