rectangle
擺得很正的矩形,四個邊都平行於座標軸
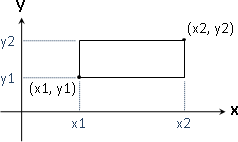
經過數學課程洗禮,大家看到矩形都是直覺想到長與寬。然而在計算學當中,我們傾向記錄左下角座標(X座標、Y座標的下界)與右上角座標(X座標、Y座標的上界)。
就算矩形退化成線段、點,這種記錄方式也不會有問題。
UVa 460 191
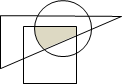
矩形相交
要判斷矩形相交相當麻煩,相交的情形有許多種。
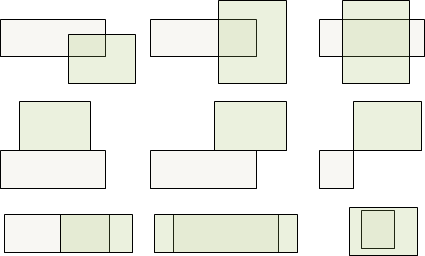
逆向思考,事情就變得容易多了:判斷矩形不相交!以第二個矩形作為基準,第一個矩形完全落在其左方、右方、下方、上方,就是不相交。
如果是空心矩形,那麼還得偵測第一個矩形是不是被第二個矩形框住,以及第二個矩形是不是被第一個矩形框住。
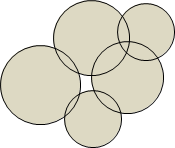
大量矩形交集,之一
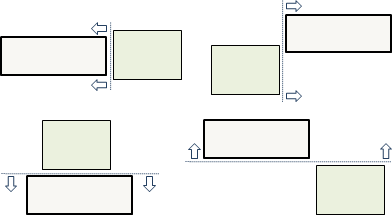
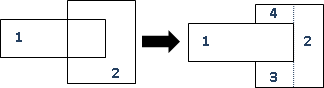
兩個矩形的交集還是矩形(可能退化成線段、點)。運用incremental method進行推理,大量矩形的交集當然還是矩形。
採用incremental method,一次讀入一個矩形,不斷更新交集。時間複雜度O(N),N是矩形數量。
大量矩形交集,之二
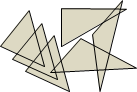
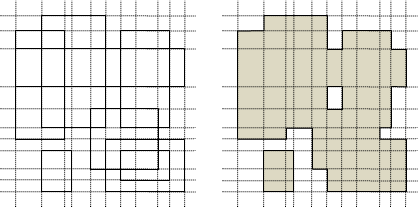
大量矩形聯集,之一
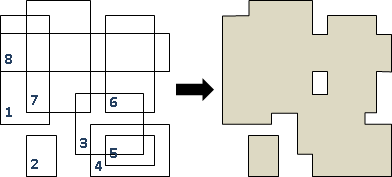
將聯集區域切割為數個矩形。採用incremental method,一次讀入一個矩形,不斷更新聯集。
下面這段程式碼僅計算聯集面積。至於聯集多邊形,就請讀者自行研究了。
時間複雜度的分析比較特別。每次更新聯集,都會增加一些矩形、減少一些矩形,所以很難估計矩形數量。
以宏觀視角觀察矩形數量。考慮所有矩形頂點,X軸離散化、Y軸離散化,最多產生(2N-1)×(2N-1)個格子。聯集區域一定是由這些格子構成,聯集區域的格子數量一定小於等於(2N-1)×(2N-1)。更進一步,聯集區域切割出來的矩形數量,一定小於等於格子數量!
更新聯集,也就是檢查聯集區域切割出來的每一個矩形,時間複雜度O(N²)。一共更新N次,總時間複雜度O(N³)。
大量矩形聯集,之二
一、X軸離散化、Y軸離散化。O(NlogN) 最多產生(2N-1)×(2N-1)個小格。 二、窮舉每個小格、窮舉矩形,判斷每個小格屬於哪個矩形。O(N³)
UVa 870 221 688
大量矩形聯集,之三
一、X軸離散化,附帶矩形左右邊界資訊。O(NlogN) 二、Y軸離散化。O(NlogN) 三、每一個橫條,由左往右掃描,判斷每個小格是否在矩形裡。O(NN) 以矩形上下邊界,判斷其左右邊界是否穿過當前橫條。 遇到矩形左邊界+1,遇到矩形右邊界-1。
大量矩形聯集,之四
觀察相鄰的橫條。相鄰的橫條的聯集區域變化,與矩形的消失、出現密切相關。我們可以運用動態的資料結構,儲存第一個橫條的聯集區域,然後逐步更新每一個橫條。
一、依序處理每個橫條。 首先建立第一個橫條的線段樹,節點附帶sum資訊。 (預先離散化X軸。O(NlogN)) 二、一次做一個橫條。看看哪些矩形離開了/進來了,更新線段樹。 (預先離散化Y軸,附帶矩形上下邊界資訊。O(NlogN)) 三、從頭到尾總共N個矩形離開了/進來了,線段樹更新總共2N次。O(NlogN) 每做完一個橫條,樹根的sum就是該橫條之內的聯集區域面積總和。 每做完一個橫條,就將sum累加至聯集面積。
ICPC 4758
Klee's measure problem
推廣到高維度。