註記
flow與s-t flow是兩個不同的概念。然而古代人當初定義問題時,卻將兩者都稱作flow,從此之後便混淆不清了。
cut與s-t cut亦有類似情況。古代人當初沒有cut的概念,將s-t cut直接稱作cut。不過自從有人發表cut的演算法之後,眾人便開始注重用詞了。
以下章節,flow譯作「流」或「循環流」,s-t flow譯作「源匯流」。
flow
從現在起,水流不再從源點流到匯點,水流改為不斷循環。
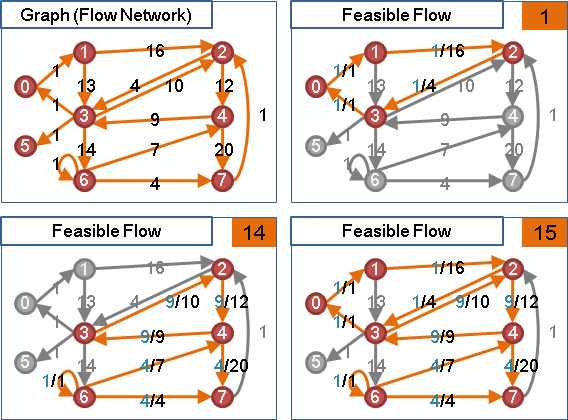
要計算總流量,可將水流分解成數個環,以環流量的總和作為總流量。每次挑一條有水流的邊開始尋找環,最多分解成E個環。
supply / demand
「供點」有水注入、「需點」有水洩出,彷彿源點與匯點。圖上可以有多個供點與需點,供水量總和必須等於需水量總和,才有機會形成可行流。
圖上每一點皆有供需水量:supply的供需水量為正值,該點流出多於流入;demand的供需水量為負值,該點流入多於流出;其他的點的供需水量為零,流入等於流出。
供需水量 = 流出水量 - 流入水量
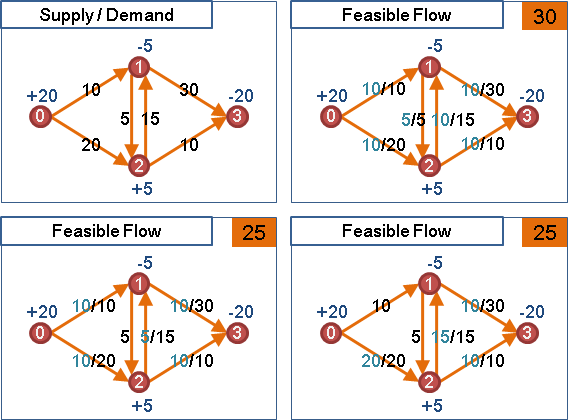
導入supply與demand之後,總流量的定義就不明確了。這裡姑且定義成:supply的總和,再加上不受supply與demand影響的循環流流量。
最大流最小割定理、可行流定理
導入水流流量:任意一個割,甲側流往乙側的水量總和,等於乙側流往甲側的水量總和。
導入容量上限:任意一個割,甲側流往乙側的水量總和,小於等於甲側到乙側的容量總和。最大流流量,小於等於任何一個「管線容量的最小s-t割」!
導入供需水量:任意一個割,甲側的供需水量總和,必須小於等於甲側到乙側的容量總和,才能形成可行流。
導入容量下限:任意一個割,甲側到乙側的容量下限總和,必須小於等於甲側到乙側的容量上限總和、也要小於等於乙側到甲側的容量上限總和,才能形成可行流。
容量下限變成零
有向邊的容量下限,得移轉至supply與demand。
預先流水,水量等於容量下限:
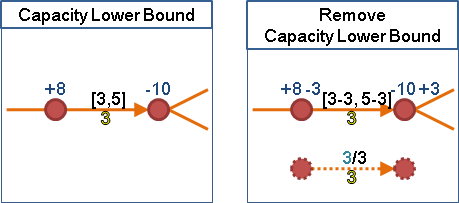
必須記錄每條邊的預流水量與耗費成本,以利之後還原。
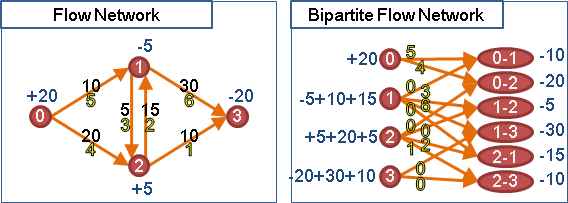
容量上限變成無限大
其實沒有必要移除容量上限──最大流演算法皆支援容量上限。不過還是介紹一下吧。
移除容量下限後,可以進一步移除容量上限。容量上限添加至終點,然後回沖:
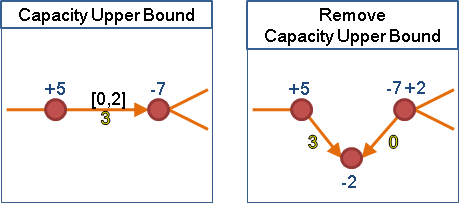
移除容量上限後,變成二分圖,得以設計更簡潔的資料結構與演算法。
負成本變成正成本
運用溯洄沖減,可以把負成本變成正成本。
預先流水,水量等於容量上限:
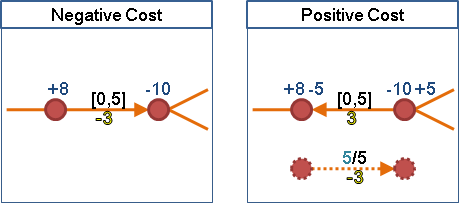
必須記錄每條邊的預流水量和耗費成本,以利之後還原。
無向邊變成有向邊
無向邊得同時雙向流動。一條無向邊可以改為兩條方向相反的有向邊,可是必須共用容量上下限。
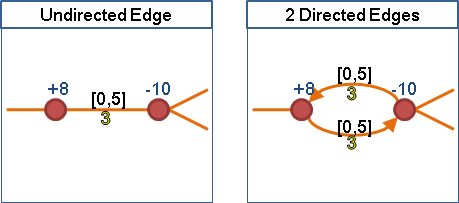
成本非負、沒有容量下限:為了降低成本,來回水流可以變成單向水流。上述兩條方向相反的有向邊,大可不必共用容量上限,宛如普通的有向邊。
成本非負、擁有容量下限:預先在無向邊上來回流動,滿足容量下限。流量是容量下限的一半,可以是0.5。如果流量只能是整數,則可以類比為0/1 knapsack problem,屬於NP-complete問題。
成本為負:同上。流量是實數,就來回流動。流量是整數,NP-complete。
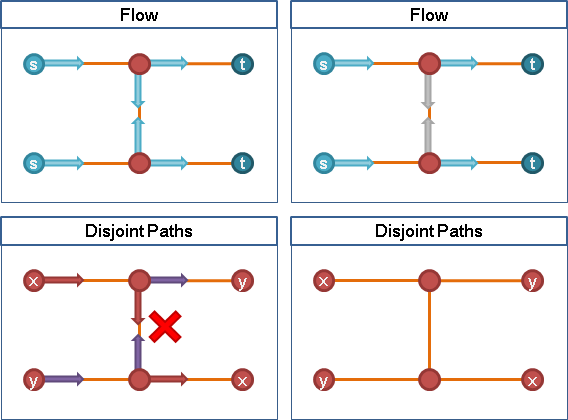
歸約
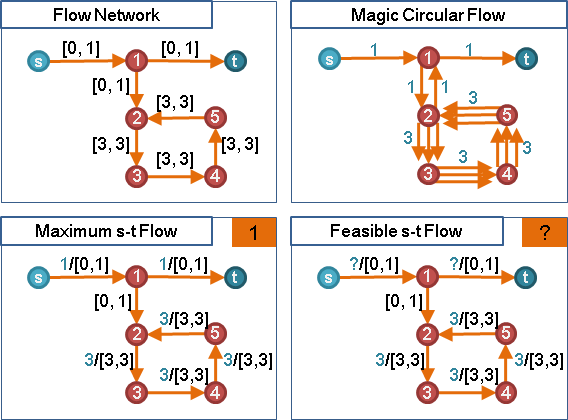
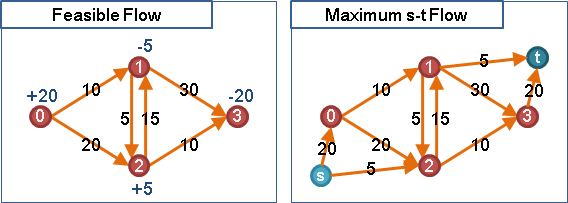
feasible s-t flow -> feasible flow -> maximum s-t flow
導入成本,依然如此。
可行源匯流化作可行循環流。匯點到源點增加一條管線,容量上限無限大(圖上所有邊的容量上限總和),成本無限小。
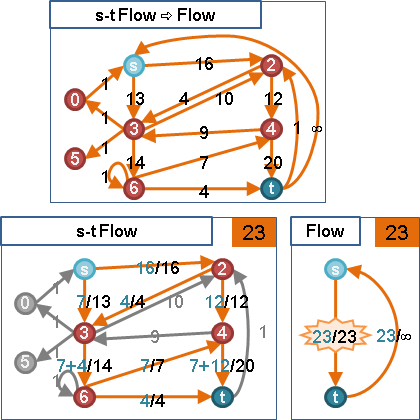
可行循環流化作最大源匯流。新增源點與匯點,源點接至supply,容量上限為供水量;demand接至匯點,容量上限為需水量。然後嘗試求最大源匯流,若源點管線與匯點管線皆滿溢,則有可行循環流,反之則無。拆除新增管線,最大源匯流就變成可行循環流。
總結
流的問題總是可以簡化成:有容量上限、無容量下限、成本非負、有向邊,許多supply和demand。
無論流動方式是循環流、源匯流,無論最佳化目標是最大流、最小流、可行流,都可以歸約成minimum cost maximum s-t flow。
UVa 11647 1259 ICPC 3787 4722 5131
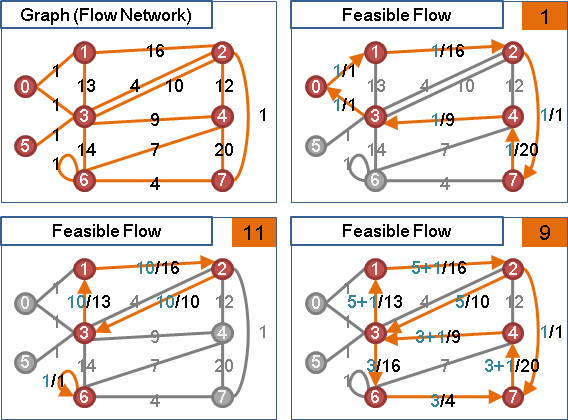
feasible flow
「可行流」。符合供需水量、容量上下限的流。
直覺的方式,就是歸約。進階的方式,就是瞭解歸約過程之後,直接以原圖實施計算,不歸約、不改圖。
承襲maximum s-t flow演算法,額外考慮flow、supply、demand等新概念。
不斷尋找起點為supply、終點為demand的擴充路徑,進行擴充後就根據水量減損supply、增益demand,直到圖上沒有supply與demand為止。
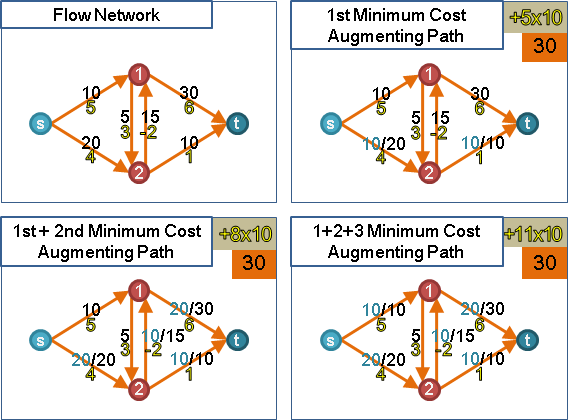
maximum flow
「最大流」。流量最大的可行流。
一、首先隨便找出一個可行流,然後不斷找擴充環。
根據最大流最小割定理,剩餘圖沒有擴充環,即是最大流。
二、窮舉所有兩點之間容量s-t割,取最小值。【尚待確認】
minimum flow
「最小流」。流量最小的可行流。
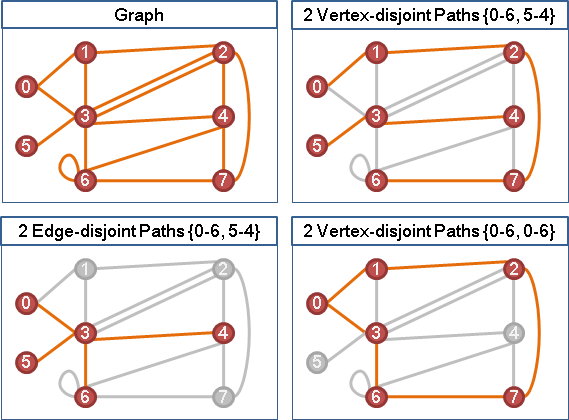
一、擴充路徑堅持使用點互斥路徑,即得最小流。【尚待確認】
二、首先隨便找出一個可行流,然後不斷消去擴充環。【尚待確認】
我找不到任何有關最小流的正確性證明!
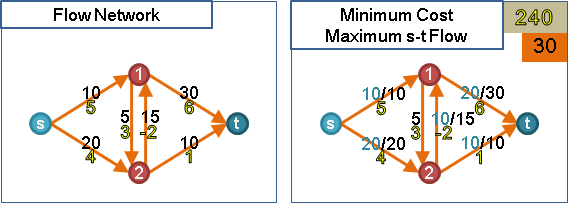
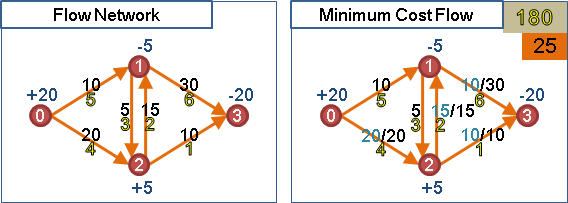
minimum cost flow
「最小成本流」。成本最小的可行流。
承襲minimum cost maximum s-t flow演算法。
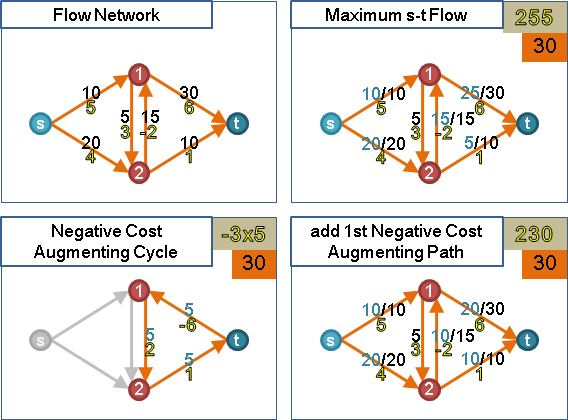
cycle canceling algorithm:先找到任意一個可行流,再以負成本環進行擴充。
successive shortest path algorithm與primal–dual algorithm:不斷尋找起點為excess、終點為deflict、成本最小的擴充路徑,直到所有excess與deflict成為零。如果excess與deflict沒有同時成為零,則沒有可行流。
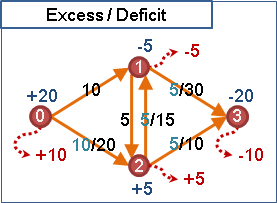
excess / deficit
「積水點」水量超出平衡,「缺水點」水量低於平衡。當圖上有excess與deficit,表示流量不平衡,不是可行流。
積缺水量 = 流入水量 - 流出水量 + 供需水量