3D convex hull
3D convex hull
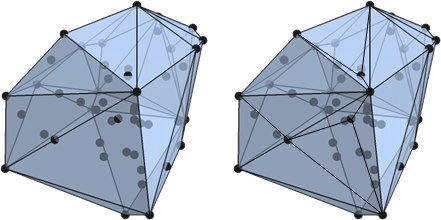
三維凸包的表面,由數個凸多邊形拼成。
為了方便儲存,凸多邊形剖分成數個三角形。
為了方便儲存,多點共面剖分成數個三角形。
三維凸包的表面,由數個三角形拼成。
p = {{5,4,8},{1,8,6},{6,6,4},{9,6,4},{7,9,7},{6,9,9},{8,0,8},{1,5,4},{1,1,5},{6,6,3},{8,6,7},{0,1,6},{9,7,10},{7,6,3},{6,2,7},{10,4,4},{5,8,2},{8,3,2},{2,6,3},{0,0,1},{7,3,3},{6,9,8},{2,8,1},{10,6,10},{5,8,10},{8,2,4},{5,7,6},{6,7,2},{1,10,1},{0,4,5},{1,3,2},{8,1,0},{4,10,2},{1,9,0},{6,3,5},{9,1,3},{8,10,1},{9,6,8},{6,2,3},{10,0,2},{8,1,10},{10,2,4},{9,0,10},{2,9,6},{10,5,10},{4,0,5},{2,3,8},{3,8,4},{3,3,10},{4,5,1}};
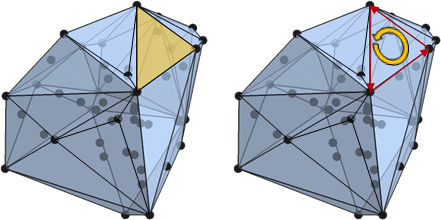
我們習慣以逆時針順序記錄三角形的三個頂點(三角形的三條邊變成有向邊)。這麼做的好處是,三角形依序取兩條邊計算叉積,就得到朝外的法向量。
facet
高維度空間的物體,一塊平坦表面稱作「刻面」,就好像被刻了一刀。鑽石就是刻面的極致工藝。
為了方便儲存,刻面從凸多邊形變成三角形。