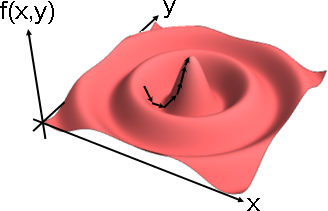
constrained optimization
「約束最佳化」。最佳化,限制輸入範圍。
輸入只能是受規範的、被指定的數值。
maximize f(x)
x ∈ C
「約束最佳化」。最佳化、等式與不等式組,兩者合體。
輸入必須同時滿足許多道等式與不等式。
maximize f(x) subject to g(x) = 0, h(x) ≥ 0, ...
約束最佳化當中,函數稱作「目標函數objective function」。等式與不等式組稱作「約束條件constraint」。等式與不等式可以重新整理成函數的模樣,稱作「約束函數constraint function」。
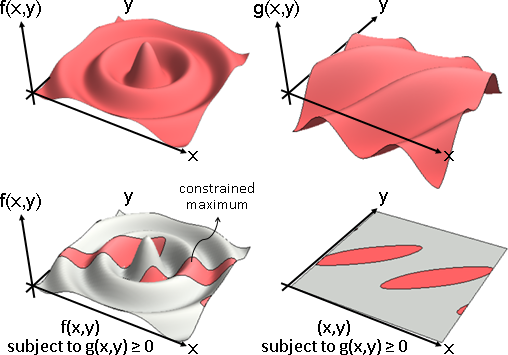
通常會存在太過完美的輸入,所以只好抑制。
施加限制,以求得更對味的答案。
Show[
Plot3D[(Cos[(x-y)/2 - 3] + Cos[y/4])/2 - 1/2, {x, -4Pi, 4Pi}, {y, -4Pi, 4Pi}, PlotRange -> {-1, 1}, Boxed -> False, Mesh -> None, Axes -> False, PlotPoints -> 50, ColorFunction -> (ColorData["CherryTones"][Rescale[#3, {-4, 4}]] &)],
ParametricPlot3D[{{u,-4Pi,0}, {-4Pi,u,0}}, {u, -4Pi, 4Pi}, PlotStyle -> {Black, Black}]
]
Show[
Plot3D[BesselJ[0, Norm[{x, y}]], {x, -4Pi, 4Pi}, {y, -4Pi, 4Pi}, PlotRange -> {-1, 1}, Boxed -> False, Mesh -> None, Axes -> False, PlotPoints -> 50, ColorFunction -> (ColorData["GrayTones"][Rescale[#3, {-6, 2}]] &)],
Plot3D[BesselJ[0, Norm[{x, y}]] + 0.01, {x, -4Pi, 4Pi}, {y, -4Pi, 4Pi}, PlotRange -> {-1, 1}, Boxed -> False, Mesh -> None, Axes -> False, PlotPoints -> 50, RegionFunction -> Function[{x, y, z}, Cos[(x-y)/2 - 3] + Cos[y/4] > 1], ColorFunction -> (ColorData["CherryTones"][Rescale[#3, {-4, 4}]] &)]
]
Show[
Plot3D[0, {x, -4Pi, 4Pi}, {y, -4Pi, 4Pi}, PlotRange -> {-1, 1}, Boxed -> False, Mesh -> None, Axes -> False, PlotPoints -> 50, ColorFunction -> (ColorData["GrayTones"][Rescale[#3, {-6, 2}]] &)],
Plot3D[0.01, {x, -4Pi, 4Pi}, {y, -4Pi, 4Pi}, PlotRange -> {-1, 1}, Boxed -> False, Mesh -> None, Axes -> False, PlotPoints -> 50, RegionFunction -> Function[{x, y, z}, Cos[(x-y)/2 - 3] + Cos[y/4] > 1], ColorFunction -> (ColorData["CherryTones"][Rescale[#3, {-4, 4}]] &)]
]
ContourPlot[(Cos[(x-y)/2 - 3] + Cos[y/4])/2 - 1/2 == 0, {x, -4Pi, 4Pi}, {y, -4Pi, 4Pi}]
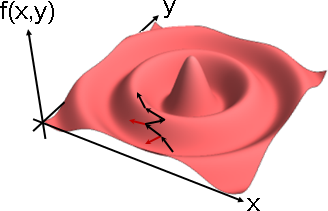
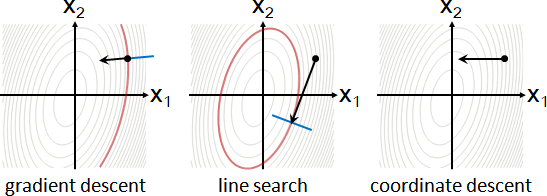
conditional gradient method(條件梯度法)
feasible direction method(可行方向法)
梯度下降法改良版。總是朝向約束條件。
p = argmin [ ∇f(x) dot (p - x) ] = argmin [ ∇f(x) dot p ]
p∈C p∈C
xnext = x + step ⋅ (p - x)
從約束條件當中,找出最符合當前梯度方向、最靠近當前位置的地點(以點積大小來判斷),然後朝該地點走一步。
找到該地點,是另一個最佳化問題。兩層最佳化。
如果約束函數很單純,則推導公式解,得到該地點。如果約束函數很複雜,則以梯度下降法,找到該地點。
projected gradient method(投影梯度法)
梯度下降法改良版。每當偏離約束條件,立即歸位。
p = x + step ⋅ ∇f(x)
xnext = argmin ‖ p - xnext ‖
xnext∈C
朝著梯度方向走一步,然後立即垂直投影到約束條件上面。換句話說,若離開約束條件,則走最短直線抵達約束條件;若未離開約束條件,則維持現狀。
垂直投影,是另一個最佳化問題。兩層最佳化。
如果約束函數很單純,則推導垂直投影公式,一步到位。如果約束函數很複雜,則以梯度下降法慢慢走入約束條件:約束函數的梯度方向,權且作為垂直投影方向。
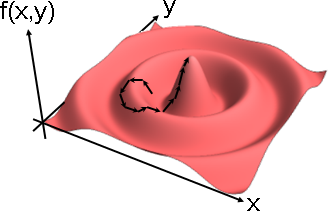
Lagrange multiplier(拉格朗日乘數)
當約束條件是等式,約束最佳化可以化作微分方程組求解。
f(x,y) 求極值。必須滿足 g(x,y) = 0。
湊出 L(x,y,λ) = f(x,y) + λ g(x,y)。
f(x,y) 的極值,等同 L(x,y,λ) = f(x,y) + λ g(x,y) 的極值。
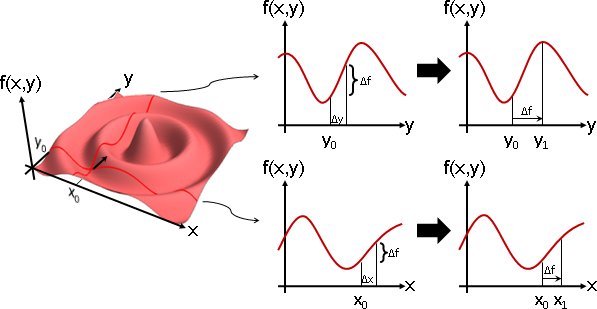
欲求極值:
對 x 偏微分,讓斜率是 0。
對 y 偏微分,讓斜率是 0。
不管 λ 如何變化,λ g(x,y) 都是零,L(x,y,λ) 永遠不變。
欲求永遠不變的地方:
對 λ 偏微分,讓斜率是 0。
三道偏微分方程式聯立,其解涵蓋了(不全是)所有符合約束條件的極值。
⎧ ∂/∂x L(x,y,λ) = 0
⎨ ∂/∂y L(x,y,λ) = 0
⎩ ∂/∂λ L(x,y,λ) = 0
上述微分方程組,簡寫成「梯度等於零」、「求駐點」。
∇L(x,y,λ) = 0
L(x,y,λ)稱作「拉格朗日函數Lagrangian」。λ稱作「拉格朗日乘數Lagrange multiplier」。
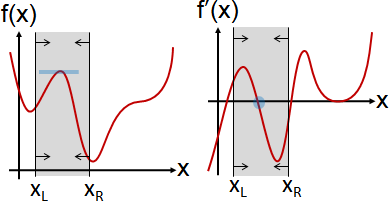
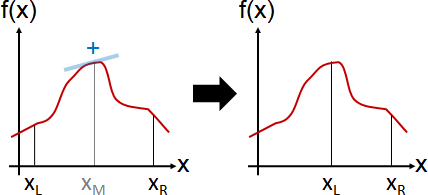
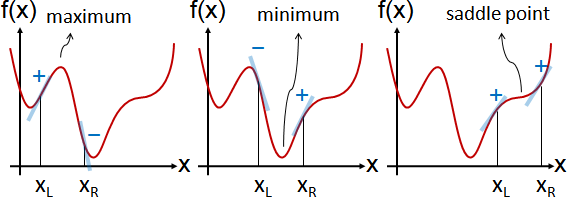
微分方程組的解(拉格朗日函數的駐點),涵蓋所有正確答案,卻也可能包含錯誤答案。必須驗證答案。檢查每個答案的鄰近函數值(篩去鞍點)、比較每個答案的函數值(篩去局部極值)。
∇L(x,y,λ) = 0 梯度等於零、求駐點。
max L(x,y,λ) ✘ 注意到,求駐點,不等價於求極值。
x,y,λ
max min L(x,y,λ) ✘ 注意到,求駐點,不等價於求鞍點。
x,y λ
另外還可以進一步得到非常漂亮的數學性質:極值所在之處,目標函數與約束函數,兩者梯度方向共線,而梯度大小不明。(梯度大小設定成未知倍率λ。)
三式分別偏微分。
⎧ ∂/∂x L(x,y,λ) = 0
⎨ ∂/∂y L(x,y,λ) = 0
⎩ ∂/∂λ L(x,y,λ) = 0
展開L(x,y,λ) = f(x,y) + λ g(x,y)。
偏微分是線性函數,擁有分配律。
⎧ ∂/∂x f(x,y) + λ ⋅ ∂/∂x g(x,y) = 0
⎨ ∂/∂y f(x,y) + λ ⋅ ∂/∂y g(x,y) = 0
⎩ g(x,y) = 0
第一式、第二式合起來,簡寫成梯度,並且重新整理。
∇f(x,y) + λ ∇g(x,y) = 0
∇f(x,y) = -λ ∇g(x,y)
拉格朗日函數改為L(x,y,λ) = f(x,y) - λ g(x,y)。
改變正負號,式子比較帥。
∇f(x,y) = λ ∇g(x,y)
上述微分方程組,簡寫成「梯度比例」。
⎰ ∇f(x,y) = λ ∇g(x,y)
⎱ g(x,y) = 0
當約束條件是大量等式,則通通乘上倍率再加總。
f(x,y) 求極值。必須滿足 g₁(x,y) = 0 與 g₂(x,y) = 0 與……。
定義 L(x,y,λ₁,λ₂,...) = f(x,y) + λ₁ g₁(x,y) + λ₂ g₂(x,y) + ...
Karush–Kuhn–Tucker conditions(KKT條件)
約束條件是等式:稱作拉格朗日乘數。極值位於約束條件上面。
極值所在之處,目標函數與約束函數,兩者梯度方向共線,而梯度大小不明。(梯度大小設定成未知倍率λ。)
maximize f(x) subject to g(x) = 0
---> solve ⎰ ∇f(x) = λ ∇g(x)
⎱ g(x) = 0
約束條件是不等式:稱作KKT條件。極值可能位於約束條件邊界或者內部。
邊界:目標函數與約束函數,兩者梯度方向共線,而梯度大小不明。(梯度大小設定成未知倍率μ。)
內部:目標函數的極值位置,已經滿足約束條件。約束條件無關緊要。(μ設定成零,讓約束條件失效。)
計算學家將兩種情況分開處理,邊界是微分方程組求解,內部是目標函數最佳化。數學家則是將兩種情況合併成一個方程組。
maximize f(x) subject to h(x) ≥ 0
---> solve ⎧ ∇f(x) = μ ∇h(x)
⎨ μ ≤ 0
⎩ h(x) ≥ 0
極值位於約束條件邊界時,梯度方向的判斷方式:
一、最大值位於邊界:目標函數的梯度方向,離開邊界。
二、約束函數大於等於零:約束函數的梯度方向,進入邊界。
梯度方向恰好相反,梯度大小必須異號。(μ必須小於零。)
| ∇f(x) = μ ∇h(x) | ∇f(x) + μ ∇h(x) = 0
----------------------|-----------------|---------------------
max f(x) st h(x) ≥ 0 | μ ≤ 0 | μ ≥ 0
max f(x) st h(x) ≤ 0 | μ ≥ 0 | μ ≤ 0
min f(x) st h(x) ≥ 0 | μ ≥ 0 | μ ≤ 0
min f(x) st h(x) ≤ 0 | μ ≤ 0 | μ ≥ 0
約束條件是大量等式與不等式:各有倍率,通通加總。
maximize f(x) subject to g₁(x) = 0, g₂(x) = 0, h₁(x) ≥ 0, h₂(x) ≥ 0
---> solve ⎧ ∇f(x) = λ₁ ∇g₁(x) + λ₂ ∇g₂(x) + μ₁ ∇h₁(x) + μ₂ ∇h₂(x)
⎪ g₁(x) = 0
⎪ g₂(x) = 0
⎨ μ₁ ≤ 0
⎪ h₁(x) ≥ 0
⎪ μ₂ ≤ 0
⎩ h₂(x) ≥ 0
regularization ≠ KKT conditions
regularization:
minimize f(x) + α g(x) + β h(x) + ... (α ≥ 0, β ≥ 0, ...)
KKT conditions:
∇[f(x) + λ g(x) + μ h(x) + ...] = 0 (μ ≥ 0, h(x) ≥ 0, ...)
regularization: α, β, ... are known parameters
KKT conditions: λ, μ, ... are unknown arguments
regularization與KKT conditions沒有任何關聯,只不過是數學式子有點像。別忘了KKT conditions還得聯立其他式子。
penalty method(懲罰法)
約束函數取平方、自訂倍率,摻入目標函數。
maximize f(x) subject to g(x) = 0
---> maximize f(x) subject to g(x) = 0 and ρ/2 g(x)² = 0
---> maximize f(x) + ρ/2 g(x)² subject to g(x) = 0
函數變陡,梯度下降法更快找到極值,不易停在鞍點。
大家習慣讓倍率除以二,配合二次方。微分時,係數相消。
barrier method(屏障法)
約束函數取對數、自訂倍率、視情況變號,摻入目標函數。
minimize f(x) subject to h(x) ≥ 0
---> minimize f(x) subject to h(x) ≥ 0 and
-ρ log(h(x)) ≥ ∞ and ρ ≥ 0
---> minimize f(x) - ρ log(h(x)) subject to h(x) ≥ 0 and ρ ≥ 0
邊界附近,函數趨近正無限大,梯度下降法不易出界。
alternating direction method of multipliers(交替方向乘數法)
一、懲罰法:約束函數取平方,摻入目標函數。(可用可不用)
二、拉格朗日乘數:約束最佳化化作函數求駐點。
三、座標下降法:變數求極值,走到最高處;乘數偏微分求根,朝梯度方向走一步。
當前位置在約束條件內與外,梯度方向正與負。【尚待確認】
非負乘數,利用投影梯度法,利用max(μ,0)保持非負。
maximize f(x) subject to g(x) = 0, h(x) ≥ 0
L(x,λ,μ) = f(x) + λ g(x) + μ h(x) where μ ≥ 0
xnext = argmax { f(x) + λ g(x) + μ h(x) }
λnext = λ + step ⋅ g(x)
μnext = max(μ + step ⋅ h(x), 0)
範例:限制條件是多道一次不等式,併成一個一次方程組。
maximize f(x) subject to Ax ≤ b
L(x,μ) = f(x) + μᵀ (Ax - b) where μ ≤ 0
xnext = argmax { f(x) + μᵀ (Ax - b) }
μnext = min(μ + step ⋅ (Ax - b), 0)
範例:兩個函數相加。使用了懲罰法。
minimize f(x) + g(y) subject to Ax + By = c
L(x,y,λ) = f(x) + g(y) + λᵀ (Ax + By - c) + (ρ/2) ‖Ax + By - c‖²
xnext = argmin L(x,y,λ)
ynext = argmin L(x,y,λ)
λnext = λ + step ⋅ (Ax + By - c)
interior point method(內點法)
一、屏障法:約束函數取對數,摻入目標函數。(可用可不用)
二、拉格朗日乘數:約束最佳化化作微分方程組。
三、牛頓法:多變數函數求根。